

Selamlar!
Bu hafta pek çok proje göstermeye çalıştık sizlere. Ana projemiz lazer tarayıcıydı, ama robot saat ve havaya yazan kalemimiz de vardı, onları kısaca anlatarak yan proje olarak gösterebildik.
Onları bütün çekimler tamamlanıp biraz vakit bulabildiğimizde ayrıntılarıyla anlatacağız, şimdilik sadece lazer tarayıcıyı anlatalım.

Robot Saat(Plotclock) internetten bulduğumuz ve bayıldığımız bir proje, buradan gerekli dosyaları indirebilir ve kendiniz yapabilirsiniz. Linkte İngilizce talimatlar ve açıklamalar da bulunuyor.



Silikon tabancasından yapılma havaya yazan kalemi de ileride detaylıca anlatacağız. Gelelim tarayıcıya.
Malzeme Listesi:
- Lazer pointer – yeşil olanlar daha iyi çalışıyor deneyimlerime göre.
- 1 adet kadeh – sapını lazer ışınını kıran lens olarak kullanacağız.
- 2 adet step motor ve sürücüsü – Biri objeyi çeviren tabla için, diğeri ise lazeri çevirmek için.
- Limitswitch – Bunu motora bağladığımız lazer ve kadeh tutacağının belirli bir açıya geldiğini anlaması için kullanıyoruz. Oraya geldiğinde start pozisyonuna geldiğini anlıyor, bir nevi sıfırlama ve kalibrasyon mekanizması.
- Sistemi yönetmek için Arduino Uno kullandım, siz rahat olduğunuz herhangi bir platformu kullanabilirsiniz.
- Fan – sürücüleri soğutmak amacıyla.
- Potansiyometre – Motor dönüş hızını ayarlamak için.
- 2 adet buton – eğer manuel kullanım isteniyorsa – yani bilgisayardan komut vermeden kullanmak için
- Fener – standart bir fener iş görecektir.
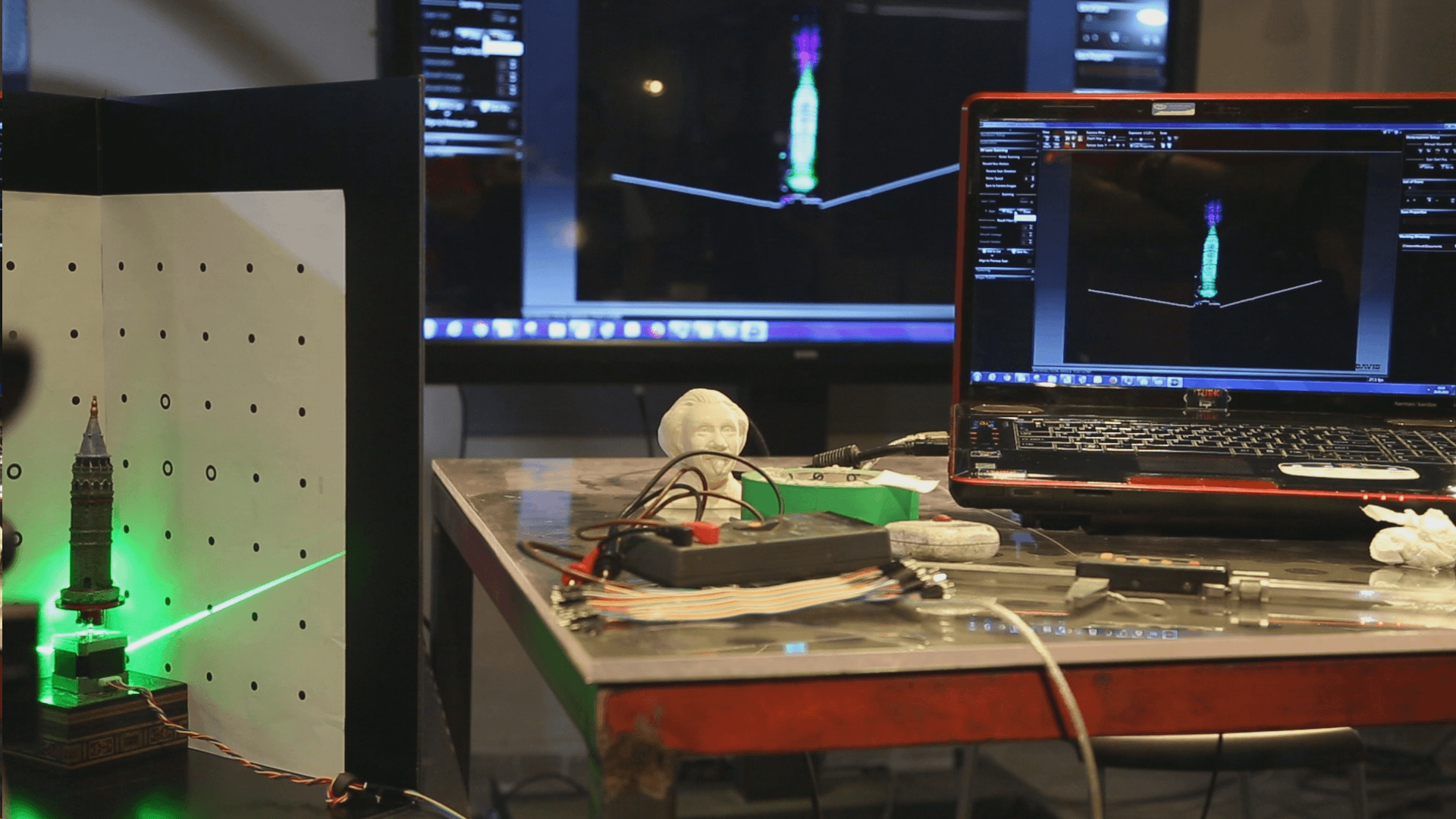
- Tripod – Biz sistemi stabil ve taşınabilir olması, ama en önemlisi de kolay ayarlanabilir olması açısından bir tripoda monte ettik, sizin keyfinize kalmış. Bu sayede hem lazer mekanizmasını, hem ışığı, hem de kamerayı her yöne çevirebiliyor ve hassas ayarlamalar yapabiliyoruz. Lazer ve kamera arasındaki mesafe ayarı önemli, obje-kamera ekseni ve lazer arasında yaklaşık 30 derecelik bir açı olmalı. Bunu da mesafeyi ayarlayarak yapabiliriz. Yani kabaca kamerayla obje arası mesafe, lazerle kamera arasındakinin iki katı kadar olmalı.
- Cep Telefonu ve tutacağı. Telefon yerine bilgisayarınıza görüntü aktarabilen herhangi bir kamera da olur. Eğer cep telefonu kullanıyorsanız, PC’ye görüntü aktarmak için Droidcam aplikasyonunu kullanabilirsiniz. Bu sayede cep telefonunuzu bir kamera olarak bilgisayarınıza tanıtabileceksiniz.
- Güç kaynağı – ATX güç kaynağı kullanabilirsiniz. Aşağıda detaylarını anlattım. Bu güç kaynağının güzelliği çoklukla kullandığımız potansiyel farklarını bize sağlayabilmesi. Yani 3.3v, 5v ve 12v. Hem de yüksek akım sağlama kapasitesine sahip. Oldukça iş görüyor. Hem Arduino ve fan ve step motorlar için 12v, hem röleler için 5v, hem de lazer ve fener için 3.3v aynı anda alabilirsiniz. Hangi kablolardan hangi voltajların sağlandığı PSU üzerinde yazar.
- Kalibrasyon panelleri ve kalibrasyon desenleri – Bu aslında aralarında tam 90 derece açı olacak şekilde tutturulmuş iki plakadan ibaret. Bu panellere aşağıda vereceğimiz desen dosyalarının çıktısını alarak uygun şekilde (doğru yönde, resimden görebilirsiniz) yapıştırın.
ELEKTRONİK KISIM:
Bu proje biraz zorlu, hassas ayarlar ve dikkat edilmesi gereken pek çok önemli noktası var. Çok fazla detaya giremeyeceğim, inanılmaz bir yoğunluk içerisindeyiz. Gündüzleri kendi işlerimiz, geceleri proje yetiştirme çabalarımız ve hafta sonu çekimlerimiz olduğundan şu anda çok fazla zaman ayırmamız mümkün olmuyor. Hep söylediğim gibi çekimler bittikten sonra detaylandıracağız.

Step motor, limitswitch ve sürücü bağlantılarını diğer projelerde detaylıca anlattım. Öncelikle lazer pointer’a kadeh sapını sabitleyin, ve bu ikiliyi de motora sabitleyin.

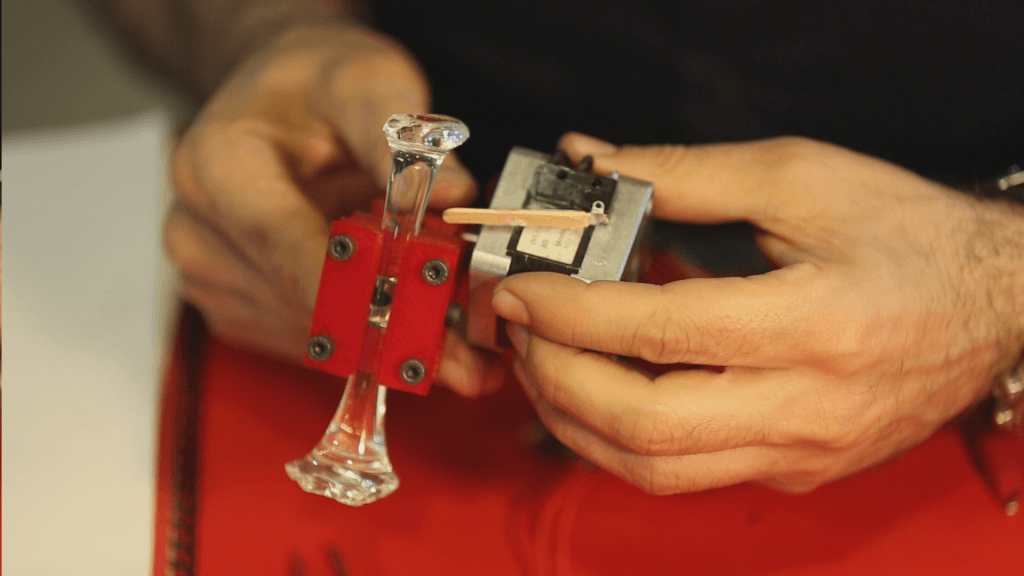
Limitswitch kolu kısa geldiği için bir kahve çubuğu parçasını yapıştırarak uzattım. Sistem belirli bir açıya geldiğinde limitswitch tetikleniyor ve başlangıç pozisyonu belirleniyor. Burayı göstermemin sebebi de şu, illa 3d printer parçaları kullanmak zorunda değiliz, bulabildiğiniz her şeyi kullanın. Kahve çubuğu robotu örneği gibi. Bir süre sonra ufacık bir çöp bile atamaz hale geleceksiniz ve aileniz sizden gizli gizli bunları çöpe gönderecek, hazır olun 🙂
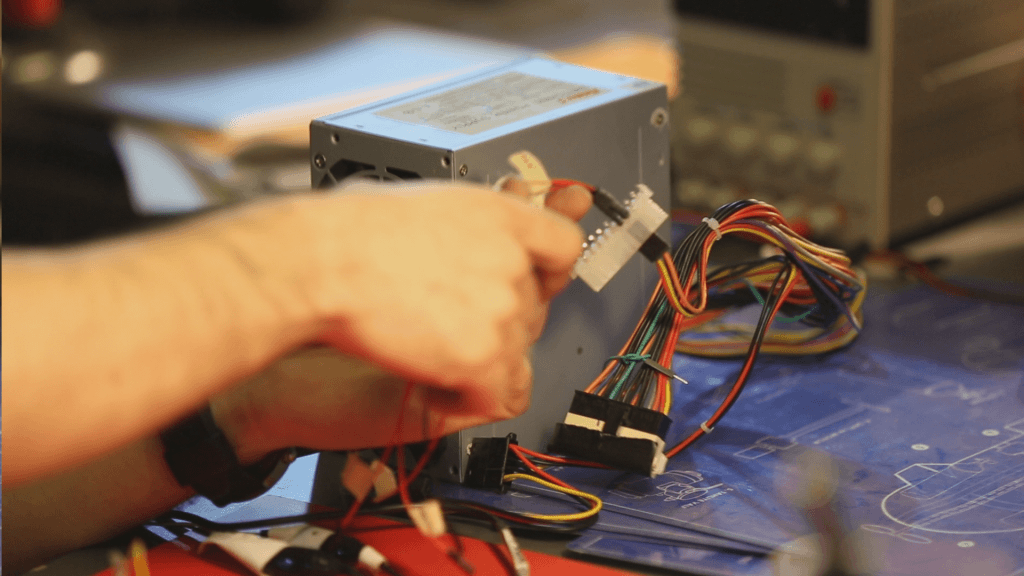
Güç kaynağı olarak ATX PSU kullanmak için lazer bateride yaptığımız gibi yeşil ve siyah kabloları birbirine kısa devre yaptırmanız gerekiyor.

Sonrasında tablamızı da motora takıp sisteme bağlıyoruz.



Bütün bağlantı pinleri için şimdilik kodu inceleyin ve oradan bakın, sonra yazıya dökeceğim. Takıldığınız yerler için şimdilik yorumlardan sorun, herkese tek tek vakit buldukça yardımcı olmaya çalışıyorum.
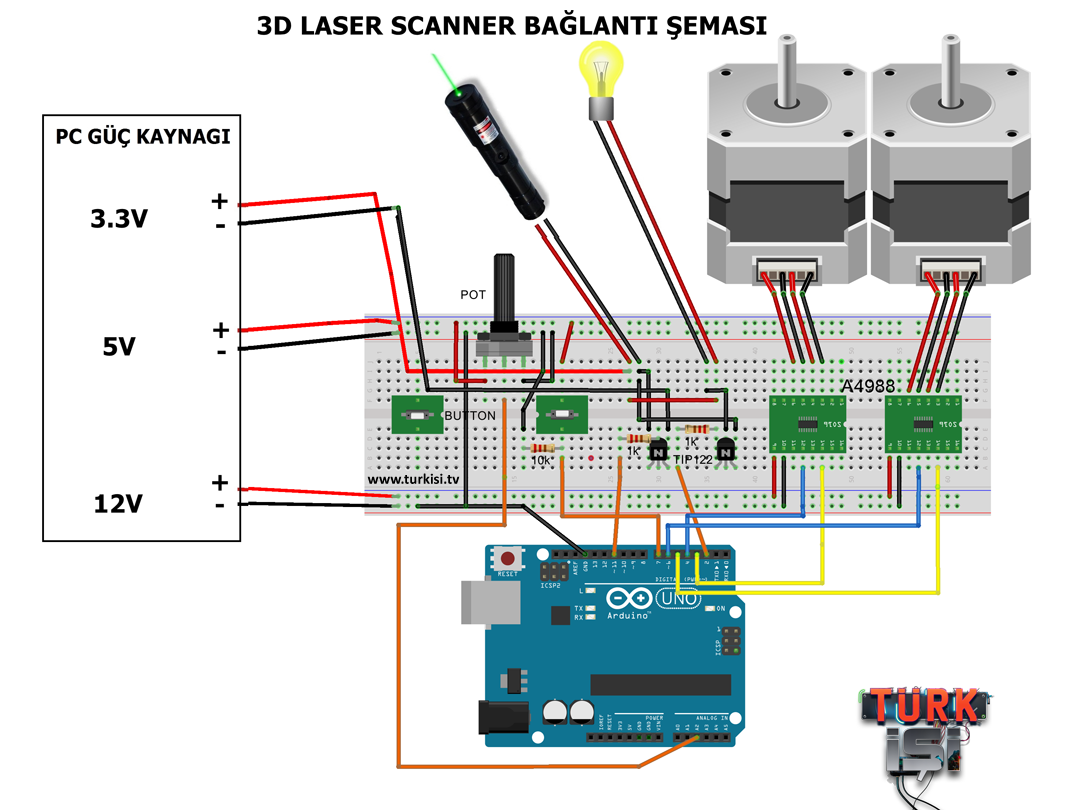
Lazeri ve feneri Arduino ile tetiklemek için basitçe tip122 kullanabilirsiniz. Şurada anlatmıştım.
YAZILIM KISMI:
2 önemli yazılım ayağımız var, hatta cep telefonu ile yapacaksak 3.

- Arduino’ya atacağımız yazılım. Bu yazılım; lazeri, feneri, motorları, kısacası elektronik her şeyi kontrol ediyor, ve bunu da bilgisayarımızdaki tarayıcı yazılımı ile haberleşerek yapıyor. Tarayıcı yazılımı bilgisayar üzerinden Com porta komutlar göndererek hangi aşamada olduğunu bildiriyor, elektronik katman da bu veriye göre gerekli hareketleri yapıyor. Arduino için gereken yazılımı şuradan indirebilirsiniz -> Lazer Tarayıcı Arduino Yazılımı 3D_LASER_SCANNER
- Bilgisayarda kullanacağımız modelleme ve tarama yazılımı. Bunu için de David Lazer Scanner programını kullanıyoruz, şuradan indirebilirsiniz.
- Eğer cep telefonu kullanacaksanız, hem pc hem de telefona yazılım kurmanız gerek. Şu siteden detayları öğrenebilir ve Droidcam uygulamasını edinebilirsiniz.
- Sistemi kurduktan sonra kameranızı kalibre etmeniz gerekiyor. Şu dosyaların çıktısını alıp aşağıdaki gibi yönlerine dikkat ederek yapıştırın ve David Laserscanner programının kalibrasyon sekmesinden gereken işlemi yapın.
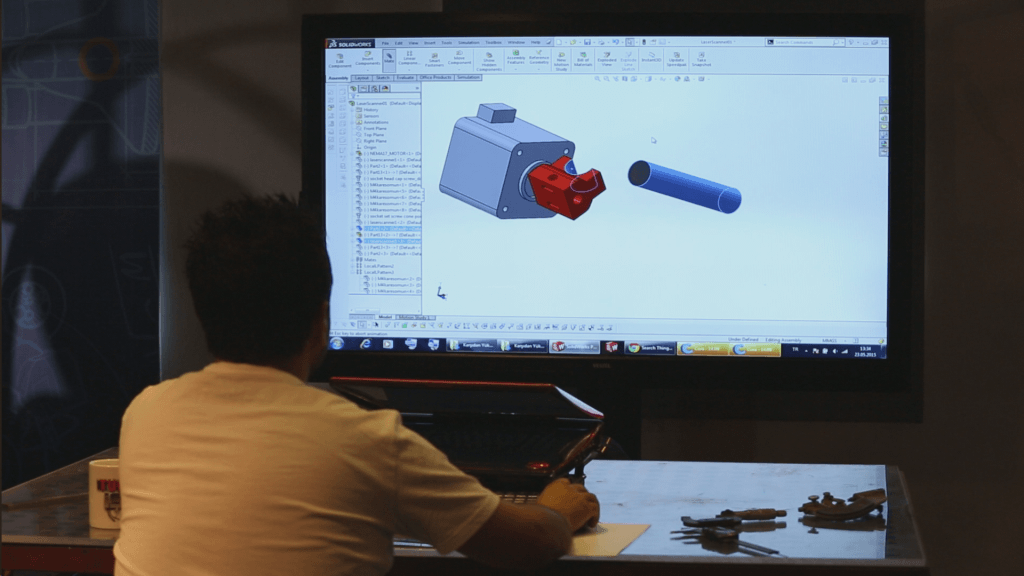
TASARIM KISMI:

Selamlar. Bu proje ile ilgili dosyaları Step formatında yükledim. Aşağıda.


TEST ve MODELLEME AŞAMASI:
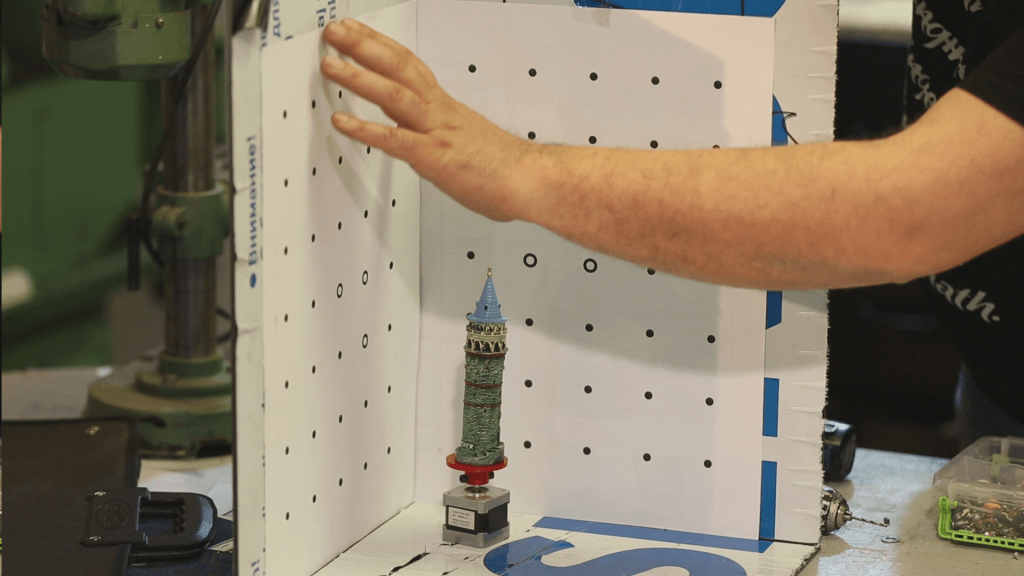
Kalibrasyon panellerini ve bağlantılarınızı tamamlayın, kalibrasyonu yapın ve taramaya başlayın.
Şimdi, eğer lisanslı sürüme sahip değilseniz, objenizi farklı yüzeylerde taradıktan sonra başka bir programla birleştirmeniz gerekecek. Herhangi bir 3d çizim programında bunları üst üste getirerek birleştirebilirsiniz. Meshlab bu işi gayet güzel yapabiliyor, üstelik ücretsiz. Şuradan indirilebilir.

Modelimiz ortaya çıktığına göre, şimdi bunu 3d printerdan basabiliriz. Cura kullanarak son ayarlarımızı yapıp baskı alıyoruz. Bundan sonrası da artık boyama ve detaylandırma – yani bence işin en zevkli kısmı 🙂





Bu esnada Metin bize mikrodalga kullanarak mükemmel bir kumpir hazırlıyor 🙂 İnanın yediğim en güzel kumpirlerden biriydi, ve mikrodalga ile böyle bir şey yapılabileceğini biz de Metin sayesinde öğrendik, ellerine sağlık! Biz olsak demir falan eritirdik, magnetronunu sökerdik ne bileyim plazma speaker falan yapardık 🙂



Haftaya müthiş bir projemiz var, bekleriz!
Türk İşi ekibi sosyal medya hesapları:
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
89 Yorumlar on "3D Lazer Tarayıcı Nasıl Yapılır?"
abi hepinize iyi geceler süpersiniz tek kelimeyle bu tarayıcıyı yaparsam cok mutlu olacagım malzemeleri tedarik ettim bugun ve yapmaya başlıcam ama bi problemim var tasarım kısımında yazdırılacak dosyaları bulamadım nasıl yapabilirim teşekkür ederim hepiniz harikasınız
Selam.
Yoğunluktan siteyle ilgilenemedim. En kısa sürede ekleyeceğim.
Abi cok tesekkur ederim ve bikmadan usanmadan herkese tek tek cevap vermeniz takdire şayan bir hareket herkes adına teşekkürü bir kez daha borç bilirim bu bu tarayıcı benim için çok önemli acilen yapmam lazım inş desteginizle yapacağımda bu arada atölyenizi kıskanıyorum oyle bir atölye her maker in hayalidir şüphesiz 🙂
İnşallah senin de olacak. Ama şimdiden kendine küçük de olsa bir alan yaratıp çalışmaya başlayabilirsin. Hepimiz önce küçük bir masada başladık bu işe unutma 🙂 Projeyi yapınca haber ver, hatta yaparken takıldığın yerde danış bize!
Abi zaten evimin bir odasıni atölye yaptim hani proje detaylarında demişsin ya şu kahve cubuguyla alakali zamanla hic biseyi atamaz hale geleceksiniz diye aynen oyle benim kucuk atolyede disaridan bakan birisi icin copluk gibi ama ben baktigim heryerde o nesneden yapilabilecek biseyler goruyorum bu isin zevkli kismi da bu bence 🙂 bu arada Fatih abinin işlerine gelip ben yardim edeyim de cizimleri yukleyebilecek zaman bulsun 🙂 keske oyle bir imkan olsada gelip atölyenizde sizi ziyaret edebilsem tesekkurler abi simdiden
~ İYİ BAYRAMLAR ~ şimdiden programınız çok güzel ben bu güç kaynagını kısa devre yaptırma işini anlayamadım müsait oldugunuz bir zaman ayrıntılı bir şekilde göseterebilirmisiniz ?
Abi kısa sürede şu havaya yazan kalemide malzemelerini ve anlatımını yapsanız çok mutlu olurum
merhabalar .. kalibrasyon için gerekli olan çıktıları alacağımız pdf dosyaları kısayol olarak görünüyor dosyalar açılmıyor .. acaba hali hazırda olan pdf dosyaları elinizde varsa yükleyebilirmisiniz .. teşekkürler ..
Evet şimdi gördüm. Tatildeyim, A3 için dropbox linki paylaşayım şimdilik -> https://www.dropbox.com/s/edcv9xyfgpu89t3/Calibpoints_V3_A3_left%26rightSide.pdf?dl=0
Bu da hata veriyor.Çıktı alamadım!Birde bağlantıları arduino cod dan hareketle mi yapıyoruz :(Herşeyim hazır,kasa,kamera,lazer,mekanik…Sadece kablolamayı tamamlayıp,kalibrasyon çıktısını halletme işi kaldı.Teşekkürler…
Kalibrasyon için dosyaları ekledim, kısayol olarak gözüküyorlardı. Şimdi indirirsen kullanabileceksin 🙂 Kolay gelsin gelişmeleri paylaş!
Kalibrasyon çıktılarını DAVID programı içinden buldum siz cevap yazmadan önce :)Arduino koduna göre lazer step 4 dir 3 table step 6 dir 5 nolu pinlere taktım A4988 i.DAVID 3D SCANNER Trial v4.3.6 yüklemiştim.Kamerayı takıp kalibrasyon yapıyorum.Ancak ;UNO’yu com portta seçiyorum,”Döner tablaya izin ver” kutucuğunu işaretlediğimde ”döner tabla ile bağlantı sağlanamadı” uyarısı alıyorum.Ne lazerin ne de tablanın motorlarını program üzerinden hareket ettiremiyorum.Tarama konumunda Başla yı tıklıyorum,program tarıyormuş gibi çalışıyor ancak motorlar hareket etmiyor.Keşke devre şeması olsaydı :(Cevaplarınız için,vakit ayırdığınız için teşekkür ederim…
David açınca Hardware setup altında Setup Type’ı “Motorized Laser Setup” olarak seçtiysen ve com port da doğruysa, sorun Arduino tarafından olabilir. Arduino serial monitorden gerekli harf komutlarını göndererek motorlara hareket verebiliyor musun?
selamlar .. herşeyim tmm sayılır sahne , programlar birleştirmeprogramı gibi.. taramayı manuel cevire ccevire yapacağım … cep telefonu ile yapmak istedim droidcam i kurup bağlantı sağladım görüntü alıyorum fakat davidscan kamera özelliklerine girmiyor ve bundan dolayı kalibrasyon yapamıyorum .. (problem davidscan ile kamera arasında aktarıcıprogram olması) bu programı kurunca bu sorunla karşılaştınız mı ?… veya bu problemi aşabilen bir arkadaş olup cevap verebilirse sevinirim 🙂 Buradan sorularıma cevap bulamazsam galiba beni yeni bir webcam almak paklar 😀 teşekkürler iyi çalışmalar
(muratbey pdf istemiştim eklemişsiniz onun için de teşekkürler )
Webcam kullanırsan sorun yaşamazsın o konuda, ama telefon kullanacaksan Droidcam’in ‘lisanslı’ versiyonuna ihtiyacın var ki brightness, contrast, gamma vs ayarlarını düzgün yapabilesin. Telefon için ayarları Droidcam pc app üzerinden yapman gerekiyor, altta en sağdaki ikona tıkla.
Hocam tekrar rahatsız ettim ama bir sorumuz olacak. Bu tarama işlemi sırasında cismin yüksekliğini ne belirliyor yani koordinat ekseni olarak z ekseni nasıl belirleniyor.
şimdiden teşekkür ederim.
Serhat merhaba. Sistem cismin yüksekliğini arkadaki kalibrasyon panellerini kullanarak belirliyor. Hatta bütün eksenlere göre konumunu. Burada sistemi kurarken dikkat etmeniz gereken iki önemli kısım var. Biri, kameranın cismi ortalaması ve de ortada tam olarak büyükçe görüyor olması. İkincisi ise, kamera düzlemi ve lazerin düzlemi arasında yaklaşık 30 derece olmalı. Yani örneğin kamera tam karşıdan objeyi görürken, lazer yukarıdan ve 30 derecelik bir açıyla görecek. Dolayısıyla trigonometri kullanarak obje, kamera ve lazer arası mesafelerinizi de hesaplayabilirsiniz.
Öncelikle çalışmalarınızdan dolayı sizi tebrik etmek istiyorum umarım bu güzel projelere devam edersiniz… birkaç sorum olacak eğer zamanınız varsa ;
1- Herhangi bir lazer pointer kullanabilirmiyiz yani kullandığınız özel bir lazer mi yoksa ucuza alınan bir lazer pointerda işimizi görürmü ..ben bu proje için kadeh kullanmaktansa çizgi lazer kullanmak düşüncesindeyim.
2-Obje üzerine düşen lazeri kamera nasıl aktarmakta pc ye bunun mantığını öğrenmek istedim yani pc de obje dışında kalan alanlar neden görünmüyor.
3-Objenin arka planında kullanılan kağıt nasıl konumlandırma yapmakta
iyi çalışmalar 😀
İrfan selam.
1. Herhangi bir lazer olur. Yeşiller daha iyi çalışıyor.
2. Kamera ayarlarıyla oynayarak exposure ve brightness değerlerini düşüreceksin. Sonrasında sadece lazerin aydınlattığı kısımlar görülüyor.
3. Sistem kamera özelliklerini biliyor (çözünürlük, görüş açısı vs) ve arkasındaki kalibrasyon desenlerinin birbiri ile olan uzaklığını da biliyor (noktalar arası mesafe ve nokta şekillerinin nerede nasıl olması gerektiğini) . Panelleri de birbirine 90 derecelik bir açıyla yerleştirip cismi ortaya koyduğumuzda, objenin 3 boyutlu uzaydaki yerini belirlemek matematiksel hesaplarla kolayca yapılabiliyor.
Merhabalar, öncelikle emekleriniz için çok teşekkür eder ve uzun soluklu bir site olmasını temenni ederim.
Arduino kodunu çalıştırırken şöyle hata alıyorum
“Çalışma oluşturulamadı” ok’e tıkladığımda da
“Program açılmadı” uyarısı alıyorum.
Sorun nedir acaba.
Merhaba Selim, bahsettiğin kod 3D_LASER_SCANNER.ino koduysa, 1.0.5 IDE ile çalışıyor. O versiyonu indirip dene istersen.
Merhabalar,
Takıldığım birkaç yer mevcut.Cevaplayabilirseniz memnun olacağım.
1) Arduino uno da shield, bread bord, direnç vs gibi ürünler kullandınız mı? Kullandı iseniz ne tür materyaller kullandınız ve bağlantı şemaları mevcutsa (motorların, uno vs) atabilir misiniz?
2) Başka bir tasarımda aralarında belirli mesafe olan iki tane farklı renkte lazer kullanıldığını görmüştüm. Farklı renkler kullanmamız ve 2 farklı açıdan lazerleri kullanıp tek çizgide birleştirmemizin kaliteye etkisi olur mu?
Sağlıcakla…
Tüm turkisi ekibine selamlar. Program hakkında bir sorum var ( David Lazer Scanner) bu programın free versiyonu kameradan aldığımız görüntüleri birleştiriyormu. yada free olarak bu işi yapan benzer program tavsiyeniz varmı ? malum öğrenciyiz the cheaper the better =)
Free versiyon otomatik birleştirmiyor, meshlab benzeri bir programa bütün scanleri atıp manual birleştireceksiniz. Ha yok illa David kullanacaksanız da benim öğrencim işini bilir diyelim 🙂
Murat abi havaya yazan kalemi anlatirsan cok sevinirim .iyi gunler
Onun yazısını hazırlamadık henüz, eksik yazıları tamamladıktan sonra yapacağız.
Tmm abi saolasin
Abilerim kolay gelsin. Ben makine mühendisliği öğrencisiyim ve hocam bitirme projesi olarak sizin 3d lazer tarayıcınızı verdi. Ben elektronik kısmında zorlanıyorum rica etsem bağlantı şemaları veya elektronik kısmını ayrıntılı anlatan bir veri varsa onu rica edebilirmiyim çok teşekkürler.
Maalesef yok. Ama bağlantıların hepsini anlattım yukarıda. Yapman gereken aslında basitçe 2 step motoru Arduino ile sürmek ve lazer için de tip122 ile bir tetikleme mekanizması oluşturmak. Çok karmaşık değil, nerede takıldığını söylersen orayı biraz daha detaylı anlatırım.
teşekkürler abi takıldığım bir nokta olursa size danışırım ilginiz için çok teşekkürler. elinize emeğinize sağlık
her sey muhteşem olmuş cok teşekkür ederim ilham verici. sorum şu kodları yazmakta baya sıkıntı çektim doğrusu yazamadım 🙂 hem kodları atarmısınız hemde yazılım konusunda tavsiyede bulunurmusunuz bi yerden baslıyım bende yardımcı olursanız sevinirim 🙂
Kodları yazıda vermiştik, oradan indirebilirsin. Yazılıma başlangıç için de code.org, codeavengers ve codeacademy sitelerini öneriyorum.
Merhabalar.Tebrik ve teşekkür ederim.Tüm hazırlıklarımı tamamladım.Ancak step formatında yüklediğiniz dosya açılmıyor.3D_LASER_SCANNER adlı arduino cod dosyası açılmıyor.Arduino 1.05 IDE ile açıldığını yazmışsınız ancak onunlada açılmıyor.Arduino cod dosyasını ve step formatında hazırladığınız dosyayı elde edebilirsem tamamlayabileceğim.Şimdiden teşekkür ve saygılarımla…
Merhaba Hakan. Şimdi kontrol ettim, dosyalar sorunsuz açılıyor. Rar içindeki 3D_LASER_SCANNER.ino dosyasını notepadle bile açabilirsin.
Teşekkür ederim.
Kolay gelsin benim bir kaç sorum olucaktıda;
1-Lazer pointerı nasıl parçaladınız ve tetikleme sistemini nasıl yaptınız
2-Güç kaynağında röleleri tetiklemek için yazmışsınız hangi röleleri
3-BreadBoardın üstü çok karmaşık geldi çok yapmak istiyorum ama çok tedirgin oldum elektronik aksamda 😀
Merhaba Kaan.
1. Lazer pointerı parçalamadık. Butonunu basılı tutacak bir print parça taktık, pilleri çıkarıp atx güç kaynağı 3.3v çıkışından besledik. Tetikleme için tip122 transistör kullandım. 3.3v girişi lazere, lazerden çıkıp tip122 kollektörüne ve emitterden de toprağa. Tip122 base’ini de 1kohm dirençle Arduino pinine takacaksın.
2. Bu projede röle kullanmıyoruz, ben genelleme yaparak söyledim, 5v kullanımına örnek vermek için. Transistör kullanarak yapacağız.
3. Çok karışık değil, aslında olay 2 motoru kontrol etmek ve lazeri tetiklemek. Hemen başla durma 🙂
merhaba siz neden step motor kullanıyorsunuz diğeriyle (mesela 2 kanallı uzaktan kumandalı arabadaki motoru neden kullanmıyorsunuz ) farkı ne ve step motor neden bu karadar pahalı 🙂 lütfen cevap.
Merhaba!!
Her projenizi takip ediyorum gerçekten harika işler başarıyorsunuz ve çok yardımcı oluyorsunuz. bunun için teşekkür ederim öncelikle. Benim tarayıcı yapmak için tüm malzemelerim hazır. Fakat yazılım konusunda takılıyorum. Buraya attığınız yazılımları çalıştırmak için özel bir program daha gerekiyor mu? İndirdiğimizde ve açmaya çalıştığımızda hata veriyor. ino uzantısıyla atılmış bir yazılım . yardımcı olursanız çok sevinirim.
Merhaba Funda. Ino dosyalarını açabilmek ve derleyebilmek için arduino.cc adresinden Arduino IDE son versiyonunu indirebilirsin. Sonrasında da bilgisayarına Usb üzerinden bağlayacağın bir Arduino üzerine yine bu program aracılığıyla bu kodu atabilirsin.
Onun dışında, kodu sadece okumak ve incelemek için Notepad veya herhangi başka bir text editör de kullanabilirsin. Sağ tuş yap ve birlikte aç de, Notepad’i göster. Kolay gelsin!
Teşekkür ederim 🙂
Lazer pointeri arduino uno da nereye takılacak
Selim merhaba. Arduino kodunu incelersen, bütün pinleri görebilirsin. Lazer tetikleyici transistörünün base’ini pin 11’e takacaksın.
Diğer bütün projelerinizi çok detaylı bir şekilde anlatmışsınız. Fakat işime yarayacak olan bu projenizde çok az detay var. Bu yazdıklarınızla projeyi yapmaya çalışsam kesinlikle yapamam biraz daha detaylı şekilde anlatırsanız sevinirim.
Merhaba Can. Burada verdiğimiz bilgilerle projeyi yapman mümkün. Yorumlarda diğer arkadaşların yaptığı gibi takıldığın yerleri sorarsan yardımcı olabiliriz.
Abi elinize sağlık çok güzel anlatmışsınız. arduino kodu indirdim açılırken hata veriyor acaba bir sorun mu var yardımcı olursanız sevinirim.
Teşekkürler Mete 🙂 Hatayı yazarsan yardımcı olabilirim.
Üst yorumlarda arkadaşın biri aynı sorunla karşılaşmış ona cevap vermişsiniz. sorunu bulup düzelttim. Teşekkürler. 🙂
Öncelikle hepinize böyle bir işe girdiğiniz için çok teşekkür ederim. Bu projeyi yapabilmem için daha detaylı bilgiler gerekli sonuçta elektrikten anlamadığım için çizimci olarak çalışıyorum:) Kalibrasyon dosyalarını kullanarak David proğramı ile manuel 3d modelleme alabilir miyiz? Sizin yaptığınız gibi otomatik tarayacak şekilde birşey yapmak istiyorum ama malum Arduino ya nasıl bağlantı yapacağım şekilde bir bilgim yok ve com yazılımını nasıl yüklemem gerektiği hakkında da bilgi sahibi değilim. Konu hakkında daha detaylı bilgi sahibi olan arkadaşlarda mail adresimden bana ulaşabilirler mi? Türk işi ekibi olarak sizlerden de yardım bekliyorum şu projeyi ayaklandırmam için yardım gerekli…. İyi Çalışmalar…
Onur merhaba. Evet, David programıyla manuel olarak da modelleme alabilirsin. Yukarıda anlattığım şekilde panelleri ve kamerayı kurduktan sonra, program ayarlarından elle taramayı seçeceksin ve çizgi lazerini obje üzerinde aynı bizim motorlar yaptığımızın benzeri şekilde gezdireceksin. Verebildiğimiz bütün bilgiyi burada vermeye çalışıyoruz. Takıldığın yerlerde buradan sormanı tercih ederiz, paylaştığımız bilgilerden herkesin faydalanmasını isteriz.
Droidcam proğramını kullanarak David programına manuel olarak 3d modelleme yapmak istiyorum. Sizin paylaşmış olduğunuz Kalibrasyon dosyalarını çıktı aldım 90 derece olarak ayarladım fakat kalibrasyon da türlü türlü hatalar alıyorum, konu hakkında yardımcı olabilir misiniz? Kalibrasyon ayarı için paylaşılmış detaylı video var mı? Teşekkürler…
Onur merhaba. Detaylı videomuz yok. Hatanın ne olduğunu yazarsan yardımcı olmaya çalışırım. Videoyu dikkatli izle, mesafeler ve açılar önemli. Kalibrasyon panelindeki işaretleri kameranın tam görmesi gerekiyor, ancak kamerayı da mümkün olduğu kadar yaklaştır ve ortala.
Projeksiyon kalibrasyonu başarılamadı.
Ölçme işaretleri (marka) ve model parametreleri arasında geçerli bir haritalama bulunamıyor.
Hatası veriyor program bunu nasıl çözümleyebilirim acaba
Orkun merhaba. Kalibrasyon paneli üzerindeki işaretlerin konumu ve doğru şekilde yerleştirilmiş olması önemli. Bunun yanı sıra kameranın da doğru açılarda objeyi ve paneli görüyor olması gerekiyor. Aşağıdaki resim gibi bir görüntü almalısın ekranda.
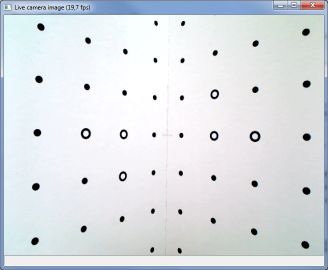
Burada en sık yapılan hata, daire şekillerinin doğru şekilde olmaması, desen çıktılarının ters yerleştirilmesidir.
lazerle nokta aldıgımız zaman cismin dışarısınada nokta atıyor kalibrasyon paneli üzerine dahi nokta atıyor bunu nasıl çözümleyebiliriz..Bir de bu el tipi tarayıcılar gibi yapma sansımız varmıdır varsa nasıl yapabiliriz…
Dışarı atmasında bir sorun yok, modeli yine de alır. El tarayıcısı olarak da kullanabilirsin bunu, David’i manuel kullanım için ayarlayacaksın ve elindeki sistemi de wireless hazırlayacaksın.
s.a. kolay gelsin 3d yazıcım var şimdi tarayıcıda yapıcam fakat takıldığım bikaç nokta var sitede cavabını bulamadım kalibrasyon paneli için kompozit malzeme gerekiyormuş galiba o tam olarak ne oluyor nerden alabilrim yardmcı olabilirmisiniz?
Merhaba Mustafa. Kompozit malzeme şart değil. Herhangi bir düz panel kullanabilirsin. İlk prototipte yer fayansları kullanmıştık hatta öyle düşün 🙂 En önemli kısmı iki yüzey arasında tam 90 derece açıyı sağlamak.
1. Parçalar uygun gözüküyor. Bir tek sürücüyü pinleri lehimli alabilirsin, uğraşmaya değmez çok az fiyat farkı vardır. Yedekli al! Bir de güç kaynağını hurda pclerden bulabilirsin çok rahat, her yerde varlar. Limit switch de öyle, 10 tl çok fazla bana sorarsan, sen optik olanına bakıyorsun, standart olanlardan çok ucuza alabilirsin.
2. Evet, diyot ısınıyor ve bozulabiliyor. Ancak bu makinede biz hiç öyle bir sorun yaşamadık, bir tarama zaten kısa sürüyor, 15-20 saniye en fazla.
3. Potansiyometre değeri önemsiz, sadece analog bir referans almak için kullanıyoruz. 1 kOhm işini görecektir.
Kolay gelsin 🙂
İyi günler Murat bey.Programınızın yeni bölümlerini dört gözle bekliyoruz.Benim takıldığım bir kısım var yardımcı olursanız sevinirim.
Sistemi manuel olarak çalıştırdım.Gayet güzel oldu.Ama ben bunu sizin yaptığınız gibi motorlarla yapmak istiyorum.Kodu inceledim ama bağlantıyı bir türlü yapamadım.Basit bir şekilde bağlantı şeması hazırlayabilirmisiniz.Teşekkürler
Selam Alper. Bir şema hazırlayıp yazıyı güncelledim, inceleyebilirsin. Hatta sana bir kolaylık yapıp, direkt buraya da ekleyeyim 🙂

Mehmet merhaba. Cevapları sıralayalım 🙂
1. Evet, kod motorized setup için.
2. Açıklama kısmını değiştirmemişimdir, ama pinler doğru ve kod da çalışan kod. Açıklama kısmını dikkate alma.
3. L değerini serial üzerinden David programına tanımladığın haberleşme portuna göndermen gerekiyor. Yani en basitinden Arduino IDE’de serial monitor açarak seçili porta L değerini gönderebilirsin. Burada aslında şunu anlamak önemli, program com port üzerinden Arduino’ya bazı değerler göndererek motorları, lazeri vs yönetiyor. Yani örneğin doğru zamanda lazeri açıyor, tarama bitince kapat komutunu gönderiyor.
4. Kodda en yukarıda yazılıma tanımlı değerleri bulabilirsin. Onun dışındaki tüm değerler için David’in içinde Communication→COM→Messages altında Advanced Settings’e bak.
Kolay gelsin!
Tamam bu kısmı anladım teşekkürler Murat abi ama şimdide şöyle bir sorunum var 😀 mesela ;
if(incomingByte == 100) { // ASCII kodu 100=d
digitalWrite(Laser, LOW);
incomingByte = 0;
}
decimal 100 ün ASCII karşılığı d ancak programın Communication bölümüne baktığımızda d ile tanımlı birşey yok acaba harfleri değiştirmiş olabilirmisiniz .?
Harfleri ekleyebilirsin istediğin gibi, diğer yorumları oku, nereden yapılacağını yazdım.
Yine bir soruyla karşınızdayım ama 😀 Nereden yapılacağını zaten ben sormuştum ve cevaplamıştınız ancak communication bölümünde turntable step motorunu hangisi aktif ediyor bulamadım. Sizin programda düzenlediğiniz communication bölümünün ekran görüntüsünü paylaşırsanız sevinirim. Buradaki gibi ;
Farketmez, sen orada hangisini tanımlarsan, Arduino yazılımında da aynı karakteri girersen olacaktır. Benim kullandığım ‘t’ harfi.
Bir türlü motorized olarak çalıştıramadım sistemi , david programında com portu seçtiğimde arduino nun serial monitor ü açamıyorum com port meşgul diyor zaten el ile değilde sistemin otomatik çalışması lazım, 7.pindeki butona bastığımda sistemde herhandi birşey olmuyor. camera olarak logitech kullanıyorum keşke ayarlar kısmının ekran görüntüsü olsaydı
Aynı porta iki programla birden bağlanamamamn normal, birini kesmen gerekiyor. Ama bir ekran bağlayarak okuyabilirsin mutlaka gerekiyorsa.
Diğer yorumlarda David ana ayarlarının yerini göstermiştim, oraya da bir bak.
Merhabalar;
Tablanın ve lazeri tutucunun çizimlerini atar mısınız 3d printerdan alıyım bende onları.
Bu arada lazeri y eksenine paralel şeklinde çıkartsak sadece tablayı döndürsek 1 adet step motor kullanamaz mıyız?
Merhaba Davut. Çizim dosyaları yukarıda var.
Bahsettiğin doğrultuda lazer ve tek motor kullanarak da yapılabilir. Ancak alacağın çözünürlük çok daha düşük olur.
İyi akşamlar Murat abi.Lazer taraması yaparken David programına aktarılan görüntü net bir şekilde elde edilmiyor.(Kullandığımız webcam logitech 5 mp.)Ayrıca tarama yaparken cismin orta ve alt kısımlarının görüntülerinde boşluklar oluşuyor.Sizce sorun nerede olabilir yardımcı olabilir misiniz?
Bir video gönderirsen ve sisteminin tam detaylarını yazarsan yardımcı olabilirim. Şu verdiğin bilgilerden anlaşıldığı kadarıyla, objeni sisteme göre konumlandırmanda, webcam ayarlarında ve ışıkta problem olabilir.
https://yadi.sk/i/3QRYOtQ2r2BXQ
Sistemin motorlu olmadığı için düzgün tarama alman biraz zor. Ancak böyle bile daha iyi sonuçlar alman gerekir, kamera ayarlarıyla ona biraz. Ve de taramayı karanlık ortamda yapman gerekir.
12volt enable , gnd ms1 ,ms3 pin4, sleep pin3, turuncu kablo 2b, mavi kablo 2a, kırmızı kablo 1a, sarı kablo 1b. ve step motorum dönmüyor.
Bağlantıları aşağıdaki şemadaki gibi yapacaksın.
Herkese merhaba, ben 3D tarayıcı yapmaya başladım. Fakat 3D_LASER_SCANNER dosyasını indirip açmaya çalıştığımda Arduino programı dosyayı açmadı. Bu dosyayı tekrar kontrol edip koyarsanız sevinirim şimdiden herkese teşekkür ederim.
Merhaba Kürşad. Şimdi tekrar kontrol ettim, çalışıyor. Sen kendi sistemini bir daha kontrol et istersen 🙂
Merhaba kontrol ettim fakat her defasında önce “Hata : Çalışma Oluşturulamadı” diyor, tamam dediğimde ise “Uyarı: Taslak çalışma açılamadı” diyor. Dosyayı defalarca indirdim olmadı. Programı mail olarak atabilir misiniz. Teşekkürler.
Açılması gerekir. Notepadle deneyebilirsin.