


Merhabalar,
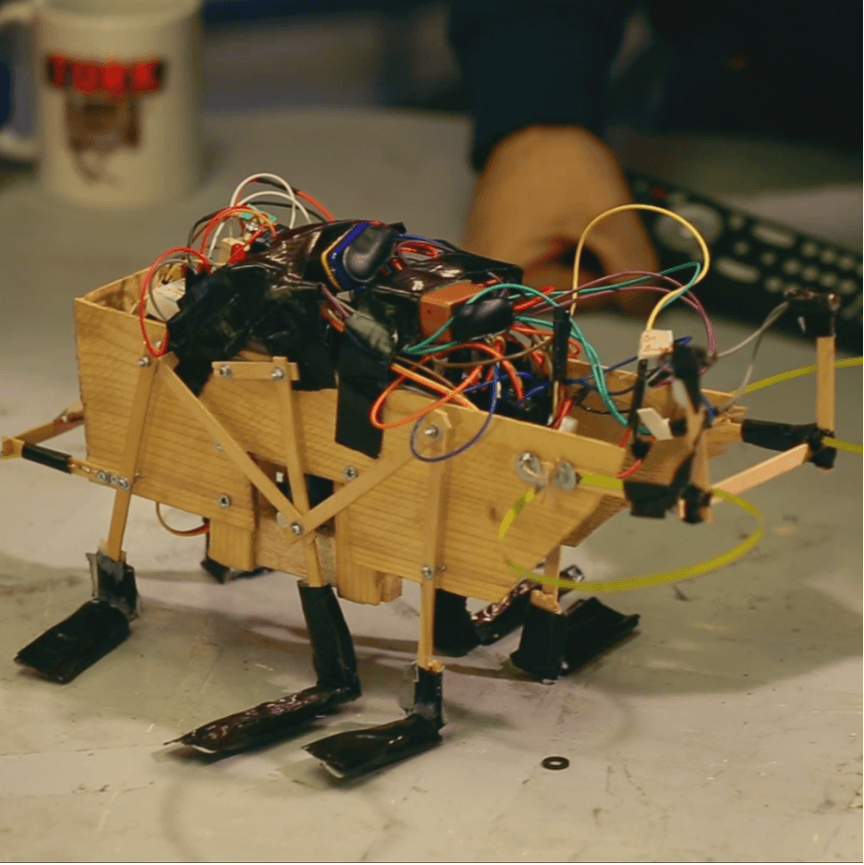
Bu haftaki bölümde de robotların dünyasına daldık, bayağı da bir karıştırdık. Önce basit diş fırçası robotu denedik, arkasından kahve çubuklarıyla bir robot yaptık. Sonrasında bunu biraz geliştirdik ve İskeletini kuvvetlendirdik, son olarak da büyük güvenlik robotumuzu yaptık. Şimdi biraz bilgilerimizi paylaşalım.
Kahve çubuğu robotunun özellikleriyle başlayayım önce, ki ne yapacağımızı bir anlayalım. Şimdi, yapmaya çalışacağımız şey, mekanik olarak bildiğimiz hexapod, yani 6 ayaklı robot.
Ben bu ayak sistemini oluşturmak için aslında şuradan kopya çektim. Buradaki resimlerde tam ölçü yoktu, o yüzden de göz kararı mesafeler belirledim, ve kahve çubuklarını bu oranlara göre oluşturdum. Aslında şu linki takip ederek giderseniz, mekaniğini çok kısa zamanda halledebilirsiniz.
Bu projenin daha derinliklerine daha ileride vakit buldukça gireceğim, vaktim çok dar olduğundan şimdilik kısa anlatımım biraz daha sunum formatında gibi olacak. Ama bana sosyal medya hesaplarımdan veya alttaki yorum alanlarından ulaşabilirseniz, sorularınızı memnuniyetle cevaplarım. İleride postları düzenledikçe daha detaylı bilgiler ekleyeceğim.
Malzeme Listesi:
- Kahve çubukları elbette. Kalın ve sağlam olanları şu ünlü kahvecide bulabilirsiniz. Hani logosu yeşil beyaz, deniz kızı olan var ya, işte o. En az 12 taneyi cebinize atın, bu arada kahvenize şeker atıyor veya ilanları okuyor gibi yapın 🙂 Ha benim gibi çok kahve tüketiyorsanız zaten şimdiye kadar yeterli miktarda kahve çubuğunuz olmuştur.
- Küçük, ince vidalar ve onlara uygun somunlar ve pullar. Karaköy’de Perşembe Pazarı’ndaki hurdacılardan alabilirsiniz. Vidalar bulabildiğiniz kadar ince olsun, pulları bağlantı noktaları aralarına koyun, somunları da arka arkaya 2 adet koyarak birini ters yönde sıkıştırırsanız kilit vazifesi görecektir. Püf noktası, çubukları çok sıkıştırmamak.
- 2 Adet servo motor. Dc de olur, fakat redüktörlü olması gerek (yani düşük RPM) yoksa robot çok hızlı gidip devrilecektir. Dc motorlar pahalı olduğundan ben elimdeki kontrol kartı bozuk Tower Pro SG90 mini servolardan 2 tane kullandım, fakat bunun için de o servoları açarak içinden tam dönüşü kısıtlayan ince mili kesmeniz, ve de içerdeki dc motora direkt +(faz) ve -(toprak) bağlantıları girmeniz gerekiyor bu sefer. İşinizi uzatsa da çok daha ucuza geliyor.
vWjRSBS(Lj9cOZw~~60_12.JPG?set_id=880000500F) Nasıl yapılacağını şurdan inceleyebilirsiniz.
Nasıl yapılacağını şurdan inceleyebilirsiniz. - Ahşap ve tahta parçaları. Hobi çıtası da olur. Burda amaç aslında basit bir iskelet oluşturmak, burası keyfinize kalmış bir süreç.
- Eski çek-at fotoğraf makinesi x2. Bunların içerisindeki CDS denen ışık sensörlerini(fotodirenç) robotun ışık algılayıcı gözleri olarak kullanıyoruz. Eski optik mouselardan da sökülebilir aslında.
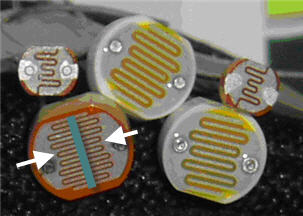 Fotorezistör – Çek-at makinelerin devresinde, flaş kısmına yakın bir yerde olur genelde.
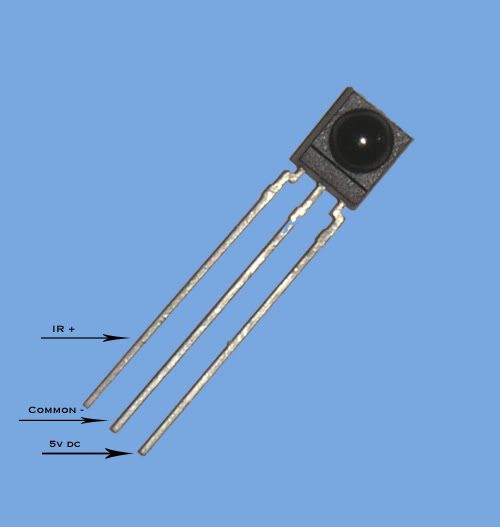
Fotorezistör – Çek-at makinelerin devresinde, flaş kısmına yakın bir yerde olur genelde. - Tv kumandası ve alıcısı. Bu alıcıyı (IR) tv kumadası benzeri bir kumanda ile kullanılan hemen her cihazda bulabilirsiniz. Ben eski bir uydu alıcısından söktüm IR alıcısını. Şuna benzeyen bir şey arayacaksınız, hemen ön paneldedir, açmadan bile görünür.
- Aşağıdaki iki resimdeki devre elemanları ve de bir adet 7805 voltaj regülatörü.

- Darbe sensörleri için limitswitchx2. Ben darbe sensörlerini çok özel bir metodla yaptım, şerit metreden ince şeritler kestim, onların esnekliğini ve iletkenliğini kullanarak bir buton oluşturdum. Fotoğraflarını daha sonra vakit buldukça paylaşacağım.
NASIL YAPILIR?
Aslında yapılacak olan iş, yukarıdaki iki devreyi bir araya getirmek. Kumandayla IR alıcısına sinyal gönderdiğimizde, 2. devredeki ledi yakmak yerine, devremizi açmasını sağlıyoruz. Tek bir 9v pil ile işi bitirmek için ise 2. devreye elektrik potansiyel farkının 5v olarak aktarılmasını sağlamak amacıyla 7805 voltaj regülatörü kullanıyoruz. Onun da devreye bağlantısı aşağıdaki şemaya göre olmalı.
Eğer benim gibi arka kısma da darbe sensörü eklemek isterseniz, bu sefer bir limitswitch de 1. devredeki 3904 transistörün emitter ve base’i arasına koymanız grekiyor.

Robotunuzu hazırladıktan sonra çalıştırdığınızda, hem bir yere çarptığında limitswitch’ler tetiklenecek ve tersi istikamete doğru gitmeye başlayacak, hem de gözlerine tutacağınız bir fener yoluyla istediğiniz yere gitmesini sağlayacaksınız. Hangi gözüne daha fazla ışık düşerse, o tarafa doğru dönecektir, motor yönü kontrolünü de devredeki LM386 Op Amp ve röle ile yapıyoruz. En son olarak da ayaklarına destekler yaptığımızda böyle ilkel ve komik bir oyuncağımız, ve de öğrenilmiş son derece değerli bilgilerimiz oluyor.
Türk İşi ekibi sosyal medya hesapları:
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
10 Yorumlar on "Kahve Çubuğundan Işığa Duyarlı Darbe Sensörlü Robot Nasıl Yapılır?"
Devre semasi bana pek aciklayici gelmedi bide role herhangi bir role olurmu ?
Kumanda devresinde ki transistor un Muadil i varmıdır
Merhaba Emre. Şema aslında çok net, ışık sensörleri herhangi bir fotorezistör olabilir, o belirtilmemiş. Hatta ben 1 ayağını (e) kullanmayarak fototransistörle yaptım (bpw serisi). Röle olarak 9v röle kullandım. 5v kullanırsan problem yaşayabilirsin. DPDT (double pole double throw) olacak. Resimdeki gibi 8 ayaklı röle al yani. İsteğe bağlı olarak, kumanda tetiklemesini ayrı bir 5v SPDT röle ile yapabilirsin.
Kumanda devresindeki transistör için herhangi bir PNP genel amaçlı transistör kullanabilirsin, önemli olan devre tasarımı sebebiyle NPN değil PNP olması. En sık bulabileceklerin arasında 2n3906 ve BC557 var.
bende kumanda alıcısı var ama devreyi kurdum boarda calısmadı acaba kumanda alıcısnın da cesitleri varmıdır merak ettim
Bizdenkinden çıkan tsop1738’di. Genelde bu veya benzeri modeller çıkar ve çalışır. Sökerken zarar vermiş olabilirsin, ölçüm yaparak bir bak bakalım.
birde led de farklı bir led olması gerekmiyor dimi :)))
Hayır, herhangi bir led olur.
bendeki alıcı tk 19 imiş olurmu :))
Çalışır. Dediğim gibi bir ölçüp bakman lazım. Bacaklar şunlar -> 38Khz sinyal aldığında 3. bacakta L0, sinyal almadığında L1 okuman gerekiyor.
38Khz sinyal aldığında 3. bacakta L0, sinyal almadığında L1 okuman gerekiyor.
ölçü aletinin hangi kademesinde ölçüyoruz
Diyot ölçümü yapar gibi kullan. Potansiyel farkına da bak.