


Selamlar,
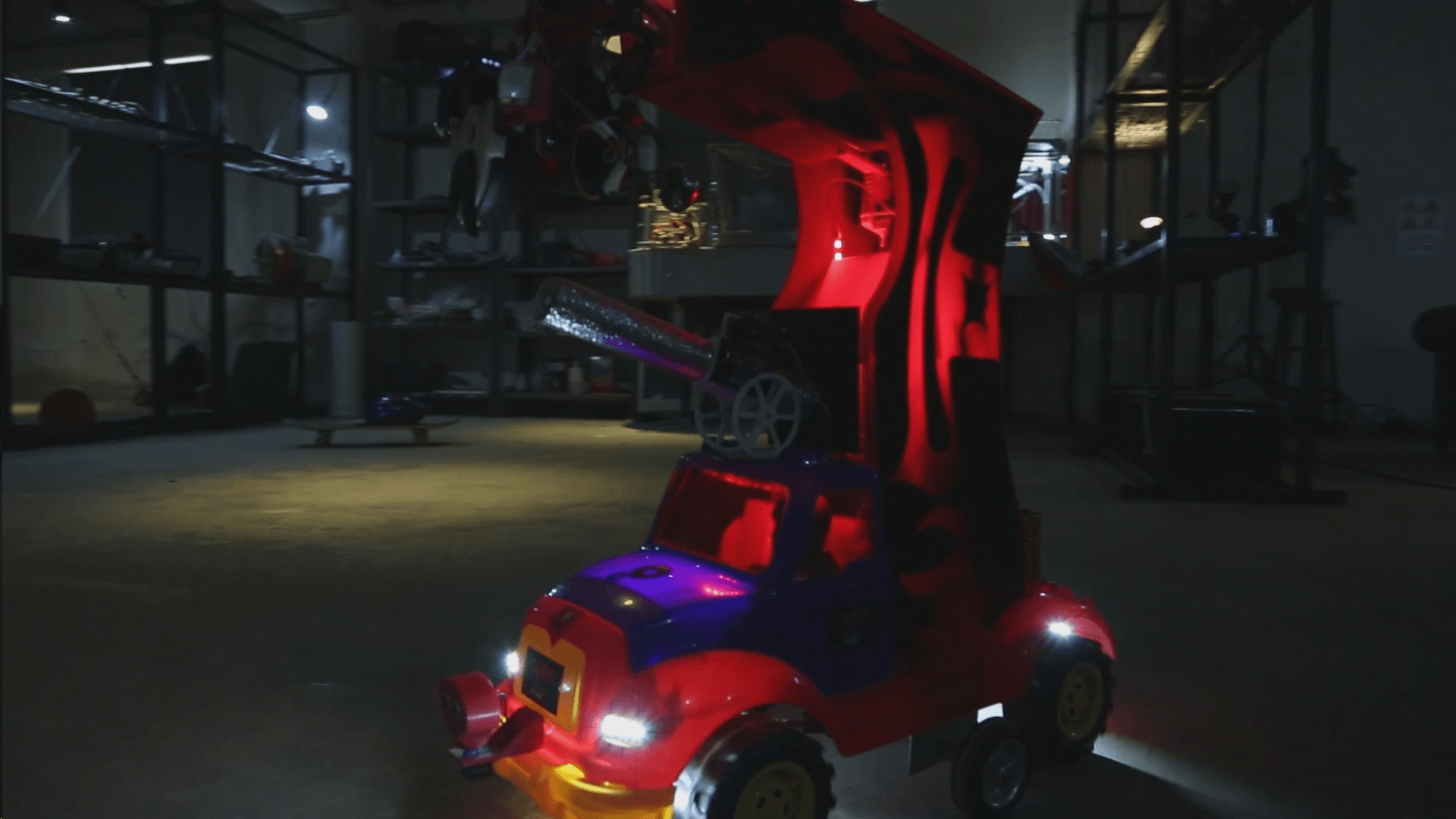
Çok zorlu bir projeyle karşı karşıyayız. Yapmaya soyunduğumuz bu iş pek de kahve çubuklarından ışığa duyarlı bir robot tasarlamaya benzemiyor. Bu robotun pek çok sensörü, motoru, sunucumuza canlı görüntü aktarabilen IP kamerası, ateşleme sistemi, ışıkları, uzaktan telefon aplikasyonuyla kontrolü, sesi ve de en önemlisi kendine göre bir zekası var. Hareket tespit edebiliyor, tespit edince devreye giren bir hırsız püskürtme algoritması var. 3 Adet modu var; bu modların biri manuel kontrol, birisi otomatik mod ve bir tanesi de güvenlik modu. Hepsi için ayrı algoritmaları var.
Dolayısıyla bu yapıyı bütün detaylarıyla anlatmak çok zor olacak, her postta söylediğim gibi, burasını zamanla daha da detaylandıracağız, fakat şimdilik çalıştığımız işlerimiz, akşamları ve hafta sonları yaptığımız projelerimiz ve de çekimlerimiz devam ettiğinden mümkün olan en fazla bilgiyi vermeye çalışacağız. Her zamanki gibi bütün kaynak kodlarımızı, çizimlerimizi ve diğer paylaştığımız bütün veriyi istediğiniz gibi alın, kullanın, değiştirin ve de geliştirin. Bize de yaptıklarınız hakkında bilgi verirseniz çok seviniriz, unutmayın ki bizi daha çok üretmeye, paylaşmaya ve öğrendiklerimizi aktarmaya motive eden en büyük etken bu.
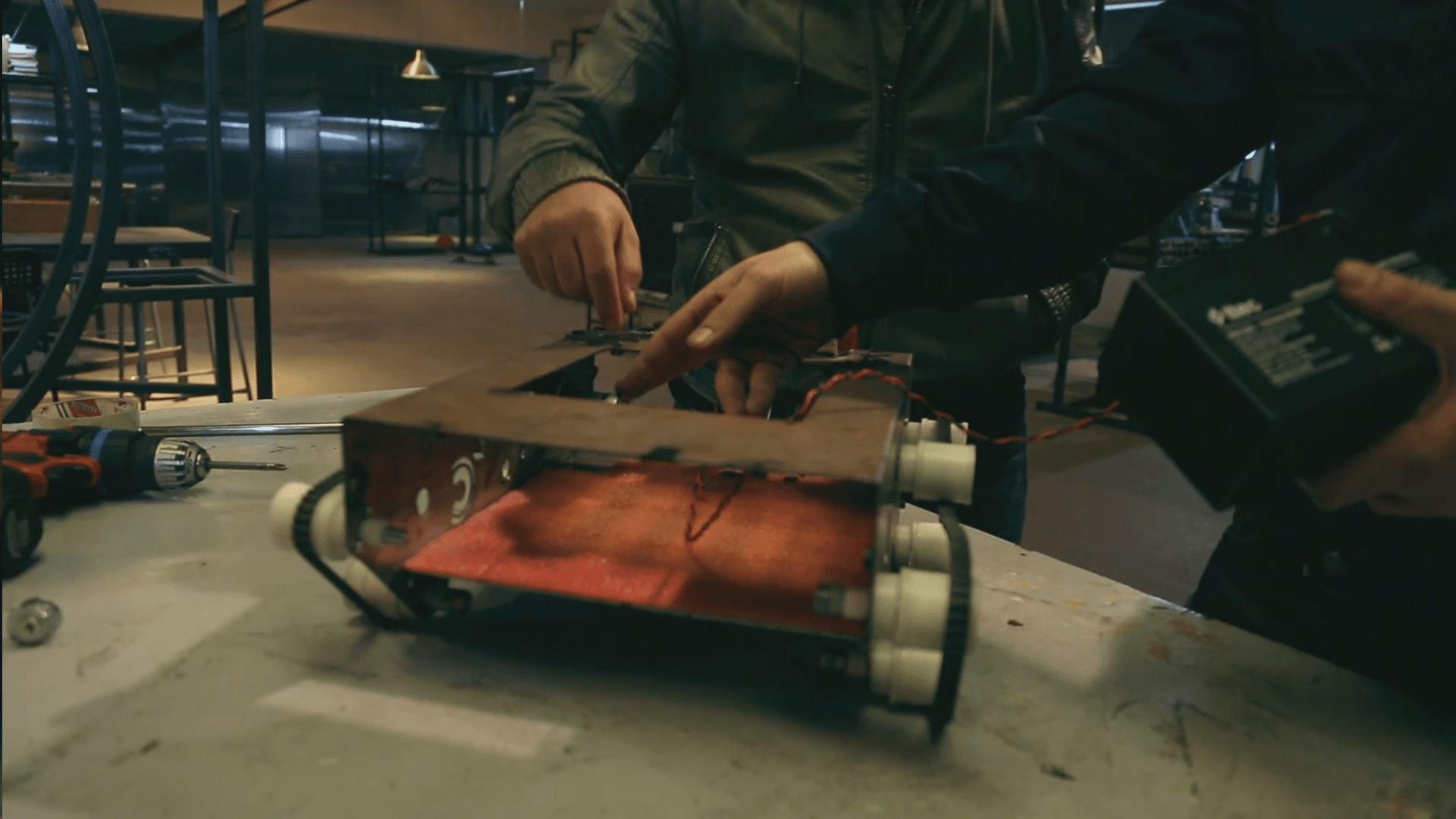
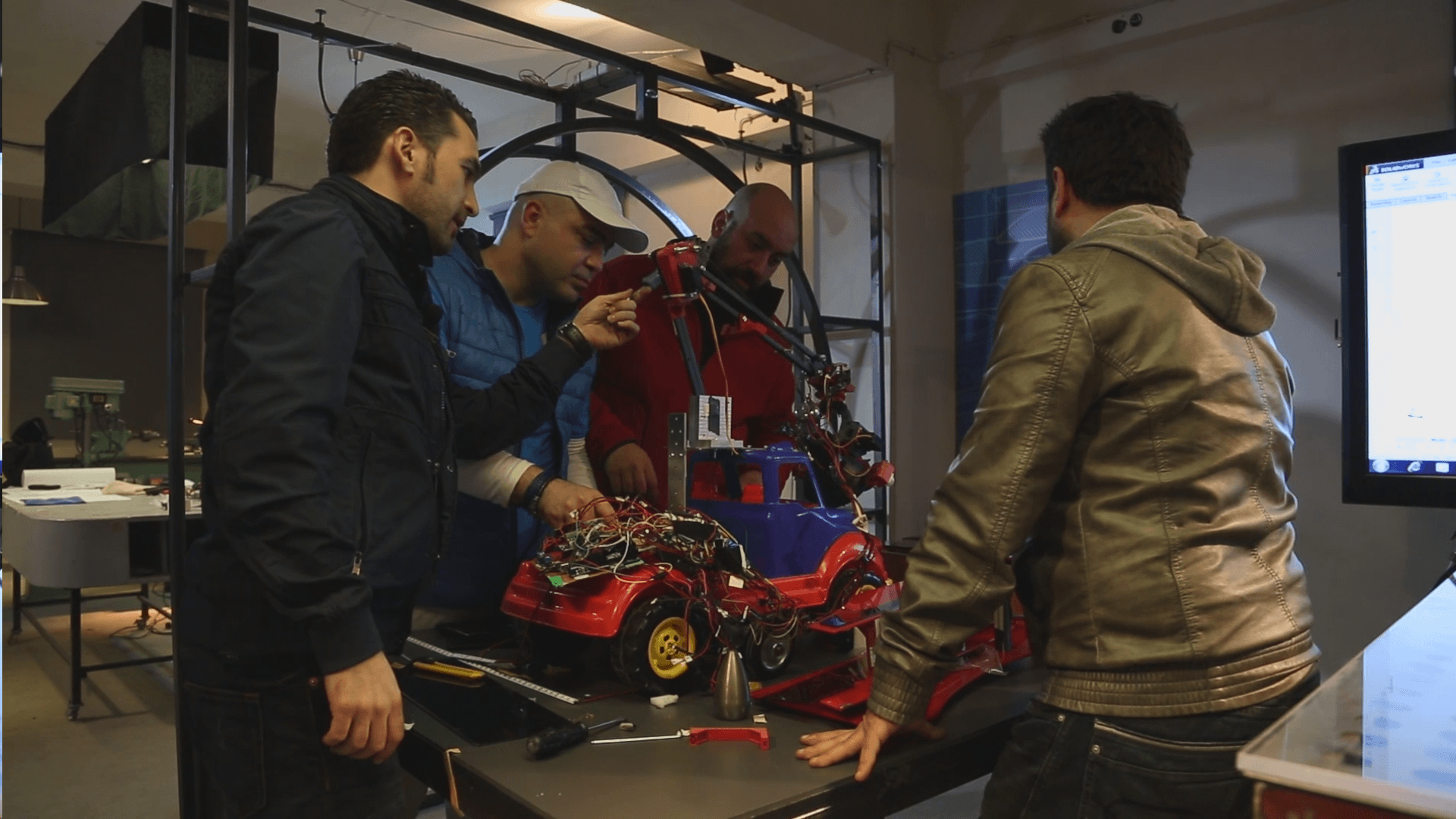
Şimdi, biz öncelikle palet sistemi ile ilerlemeye karar verdik, fakat yeterli malzememiz yoktu, ve elde olanlardan toparlamaya kalkınca motorlarımızın gücü yetmediği gibi, sistemin motor bağlantı kısımlarının tasarımında genel bir sorun vardı. Fatih ve Özkan bu sorunu giderebilirlerdi, fakat oyuncak arabayla ilerleme fikri bizi cezbetti. Bunun sebebi, bütün mekaniğinin hazır ve çalışır durumda olmasının yanı sıra, sadece palet için yaptığımız motor sistemini bu oyuncak kamyona aktararak hareket mekanizmasını çözebilecektik.

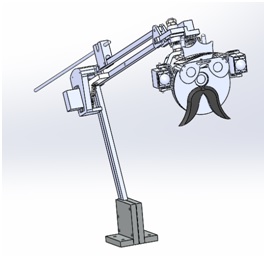
Robotun üst kısmını masa lambasından yaparak da yine elimizde olan hazır bir mekanik sistemi kullandık aslında. Bu sayede de hazır bir sistemi sadece tasarladığımız eksenlerde motorize ederek işimizi kolaylaştırdık.
MALZEME LİSTESİ:
Sanırım bu, hazırlayacağım en uzun malzeme listesi olacak, bir yerinden başlayalım bakalım.
- Arduino Mega – Mega kullanmanız şart, çünkü kullanacağımız kütüphaneler, bazı sensör ve kartlar otomatik olarak bir takım pinleri kullanım dışı bırakacak. Daha doğrusu işgal edecek. Onun dışında da, zaten ekipmanımız için çok fazla miktarda pin kullanmak durumunda kalıyoruz, daha az pine sahip başka bir modeli bu proje için kullanamıyoruz.
- Sağlam bir güç kaynağı, 12V ve en az 7A. O bile zaman zaman sorunlar yaşamanıza sebep olabilir. Lipo kullanmak elbette süper bir tercih olurdu, fakat böyle bir robotun enerjisini sağlayacak bir li-po çok pahalıya gelecektir. Onun yerine hurdacıdan 8 TL’ye aldığımız bir aküyle işi çözebildik. Ağır olmasına ağırdı, ancak palet devre dışı kaldıktan sonra sistemimiz bu ağırlığı kaldıracak kapasitedeydi. Asit bataryaları her zaman güvenilir buluyorum, ağır olmasa gayet kullanışlı ve ucuz olduklarını düşünüyorum. Elbette bir quad yapacaksanız paraya kıyıp li-po alacaksınız, çünkü discharge rate, yani akım aktarma kapasiteleri çok yüksek, ve de hafifler.
- IP kamera – Biz kamerayı Ümraniye’deki bit pazarından bulduk. İlerleyen bölümlerde orayı da tanıtacağız, inanılmaz ucuz fiyatlara alabileceğiniz malzemeler var. Elbette çalışıp çalışmadığından atölyenize gelmeden asla emin olamıyorsunuz 🙂 Ancak 5 TL’ye CC kamera almanın tadı da başka hiçbir yerde yok.
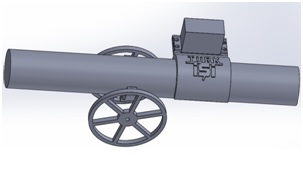
- Ultrasonic Sensör – Bunu robotumuz hareket ederken nerede olduğunu bilsin diye kullanıyoruz. Ultrasonik sensörlerin çalışma prensiplerini programda anlatmıştım.
- 2 Adet Dc motor ve 1 adet çift motor sürücü kartı veya sürücü kartı kullanmak istemeyenler için L293D entegresi.
- 5 Tane servo motor. Biz 2 tane küçük SG90 Tower Pro ve 3 tane de MGR996R kullandık. 2 servo kafa pan/tilt (pan yapan servo büyük, fakat tilt yapan servo küçük, çünkü denge ağırlığı kullanarak servo üzerinde yük kalmamasını sağladık, dolayısıyla gayet yeterli oldu), 1 servo vinç mekanizmasını indirip kaldırabilmek için, 1 servo öndeki ultrasonik sensörü sağa sola çevirmek için (bu da küçük) ve de son servo öndeki topu ateşlemek için 🙂
- 2 adet PIR sensörü. Bunları akıllıca bir şekilde açılarını kesiştirerek kullanıyoruz. Yani iki kulakta bulunan bu sensörlerin algılama açılarının kesişimlerini 60 derece olarak ayarladık. Bu sayede 60 derecelik bir hassasiyetle hareketin nereden geldiğini anlayabiliyor robotumuz. Bunu istediğiniz kadar küçültebilirsiniz, fakat hazırladığım kodu da ona göre revize etmeniz gerekir, ve eğer masa lambasından ve de bizimki kadar büyük bir robot yapıyorsanız, dönüşlerdeki sarsıntıları dikkate alarak uygun bir hassasiyet açısı ayarlamanız gerekir.
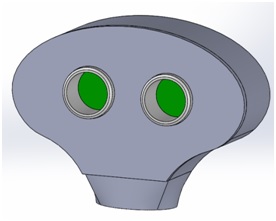
- Gözler için 2 adet Power Led, ve de bunları sürmek için 2 adet Tip122 transistör kullandım. Elbette base’lere 1 kiloohm direnç kullanacaksınız ve de en önemlisi enerji yükten yani ledlerden kolektöre gelecek ve emitter direkt GND hattına bağlanacak. Tersini yaparsanız çalışmaz. Yani 12v->kolektör ve emitter->led>GND yaparsanız sistem çalışmıyor. Kullandığınız Power Led’in kaç watt olduğuna göre ucuna koymanız gereken direnç değişir, ama yaklaşık 350 ma akım vermeniz gerekir, bunun için gereken direnci V=I*R ile, W=I*V veya W=I*I*R ile kolayca hesaplayabilirsiniz.
- Ses için mini amplifikatörlü hoparlörlerden çıkış aldık, bu sayede ses desibeli bayağı yüksek ve ses de net oldu. Burada dikkat edilmesi gereken nokta ise ses dosyalarını encode ederken özel bir sistem kullanmanız, bunu yazılım kısmında anlatacağım.
- SD card modülü. Bu modül de özel bir şekilde bağlanmalı, yoksa ses çıktısı almakta zorlanırsınız. SD kart modülünün GND çıkışına(sgnd) 3904 transistör bağlamanız gerekiyor. Yani E-B-C olarak düşündüğümüzde, B->4,7 kohm ile Arduino pinine, E->Modülün SGND girişine, ve de C de hoparlör çıkışınızın (-) hatına bağlanmalı. Garip geldiğinin farkındayım, ama sistem diğer türlü çalışmayacak 🙂
- Kapasitör ve dirençler, değişik değerlerde. Zaten bu tip işlere girişiyorsanız en kötüsü gecenin bir yarısında ihtiyacınız olan basit devre elemanlarından birisini bulamamaktır. Hemen hurda bir elektronik kart bulun, üzerinde çok büyük ihtimalle aradığınızı bulursunuz. Diğer türlü de mutlaka sık kullanılan bütün devre elemanlarından bir miktar stoklu olarak edinin. Özellikle servo motorlara bağlayabileceğiniz kadar yakın bir noktaya mutlaka 1000mf elektrolitik ve 0.1mf seramik kapasitörleri bağlamanızı tavsiye ederim. Bunları motor girişine en yakın noktaya, ve artı artıya, eksi eksiye olacak şekilde güç girişlerine paralel olarak bağlayın. Bu sayede motorlara giren gürültüyü (spike, yani voltaj değerlerindeki ani zıplamalar diyelim) biraz olsun engelleyebilir ve motorların tahmin edilemeyen hareketlerini minimum seviyeye indirebilirsiniz.
- Bluetooth modülü – HC05 ler işinizi görecektir.
- SD kart – Tavsiyem 2 gb üstü olmasın ve de class 4ler bu iş için gayet uygun.
- Voltaj regülatörü – Keyfinize kalmış ya 78xx serisinden ihtiyacınız olan(biz 7805 ve7806 kullandık) ya da hazır yapılmış ayarlı potansiyometreleri olan bir voltaj regülatörü kullanın. Bunu kullanmanın amacı şu, örneğin kameramız 5v ile çalışıyor ve ledlerimiz 12v ile çalışıyorsa, tek bir güç kaynağı kullanarak iki farklı potansiyel farkını devreye sağlayabilmek. 7805’i direkt kullanırsanız, çok ısınacaktır, soğutucu kullanmanız gerekir. Çünkü üzerindeki 12v potansiyel farkını 5v seviyesine indirmek için üzerinden geçen elektrik enerjisini ısı enerjisine çevirecek. Çok verimsiz olduğundan daha akıllı entegreler ile işi çözmek daha iyi bir çözüm. 7805’i direkt bağlamayıp bir devre yardımıyla kullanmanız gerekiyor. Ya da LM serisi entegreler kullanabilirsiniz, verimi daha yüksektir.
- Masa lambası
- Oyuncak Kamyon
- Zevkinize göre uygun renk ve miktarda Led
- Bolca kablo tabi ki. Hangi boyutlarda araba ve lamba kullanacağınıza göre değişir.
- 3D Printer! En bombayı sona sakladım. Biz bütün ara parçaları ilk bölümde yaptığımız 3D printerı kullanarak hazırladık. Ama size bütün mühendislik çizimlerini sağlıyoruz, dolayısıyla eğer printer sahibi değilseniz yine de çizimlerimizi indirerek baskı veren firmalardan yaptırabilir, veya parçaları başka malzemeden üretebilirsiniz (CNC vs). Ben 3D printer yapmadan önce atölyemde prototip yaparken hep hobi çıtası kullanırdım örneğin, kahve çubuğu robotunda olduğu gibi! En kötü bu yolla ilerleyebilirsiniz.
ELEKTRONİK KISIM:
Kart şeması aşağıdaki gibi olacak. El çiziminin kusuruna bakmayın lütfen, ilk fırsatta düzgün çizimleri koyacağım.

Ses için eğer hoparlör yeterli gelmiyorsa, aşağıdaki devreyle güçlendirebilirsiniz. Ben amplifikatörü içinde bir hoparlör sistemi kullandım, çünkü istediğim desibelde ses almaya çalıştığım zaman ses kalitesini korumak için daha büyük bir devre yapmam gerekiyordu ve de elimin altında hazır amplifikatörlü hurda pc hoparlörleri varken uğraşmanın çok da anlamı yoktu.
Bluetooth bağlantısı da aşağıdaki şekilde voltaj bölücülerle yapılacak. Biraz daha vaktim olduğunda bu modülü nasıl programlayabileceğinizi de anlatacağım, şu anda bluetooth aramasında istediğiniz ismi görmeseniz, ya da varsayılan 38400 Baud rate ile veri transferi yapsanız da pek bir şey farketmez diye düşünüyorum. Yine de programlamanın nasıl yapılacağına ilişkin şu linkten faydalanabilirsiniz. Bir tek dikkat etmeniz gereken nokta şu, aldığınız modülün üzerine iyice bakın, eğer küçük minicik bir reset butonu görebiliyorsanız, ona basarak AT komut moduna almanız gerek. Eğer o buton yoksa normal prosedür takip edilebilir.

Power ledler ve tip122 bağlantıları da daha önce tarif ettiğim gibi aşağıdaki şemaya göre yapılacak.

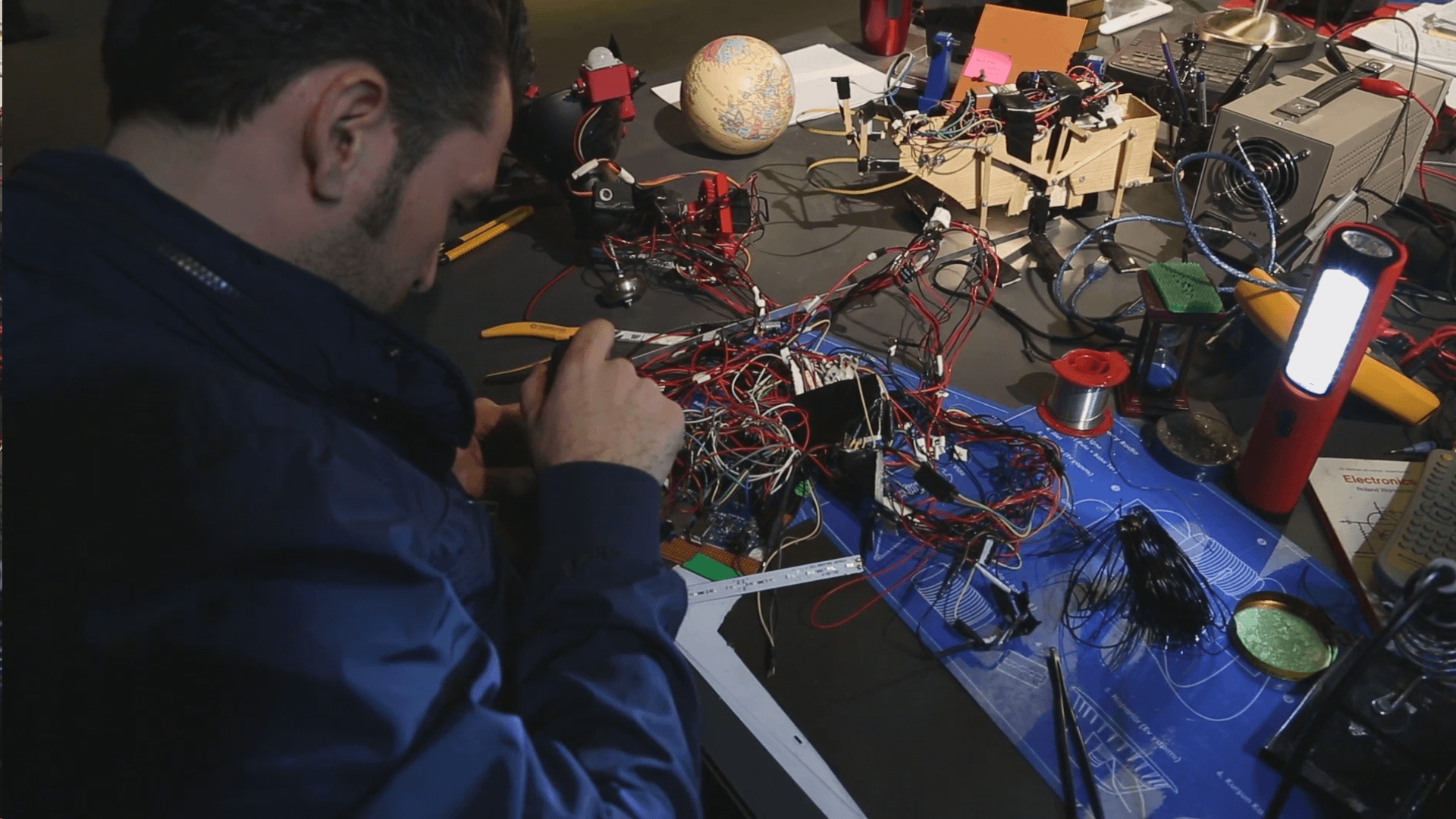
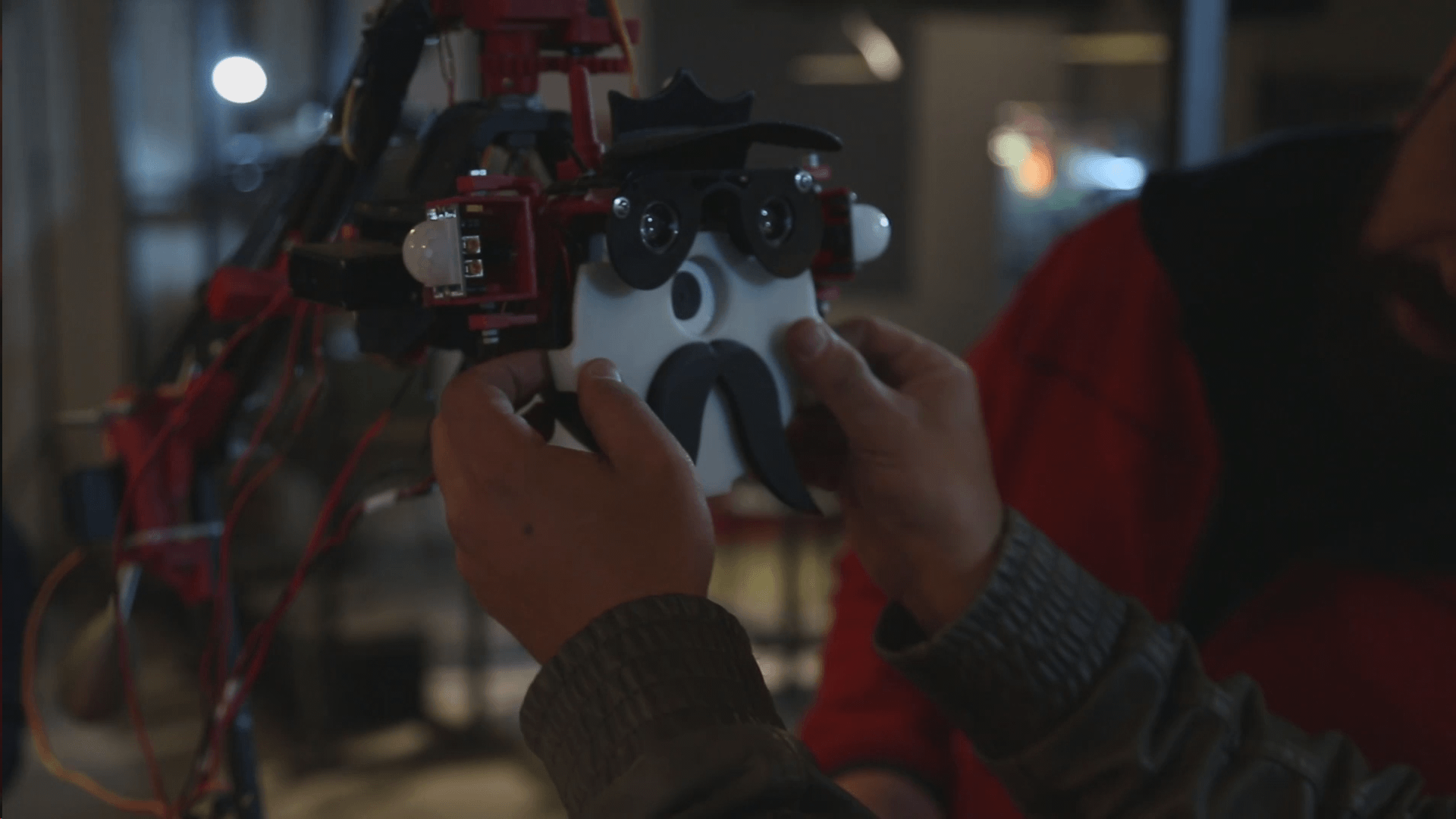
Her şeyi bağladıktan sonra aşağıdaki gibi bir manzarayla karşı karşıya kalacaksınız. Kolay gelsin diyorum.
Sistemi toparladıktan sonra şöförü de unutmadık tabi. Süsleme kısmı en eğlenceli kısmı işin!
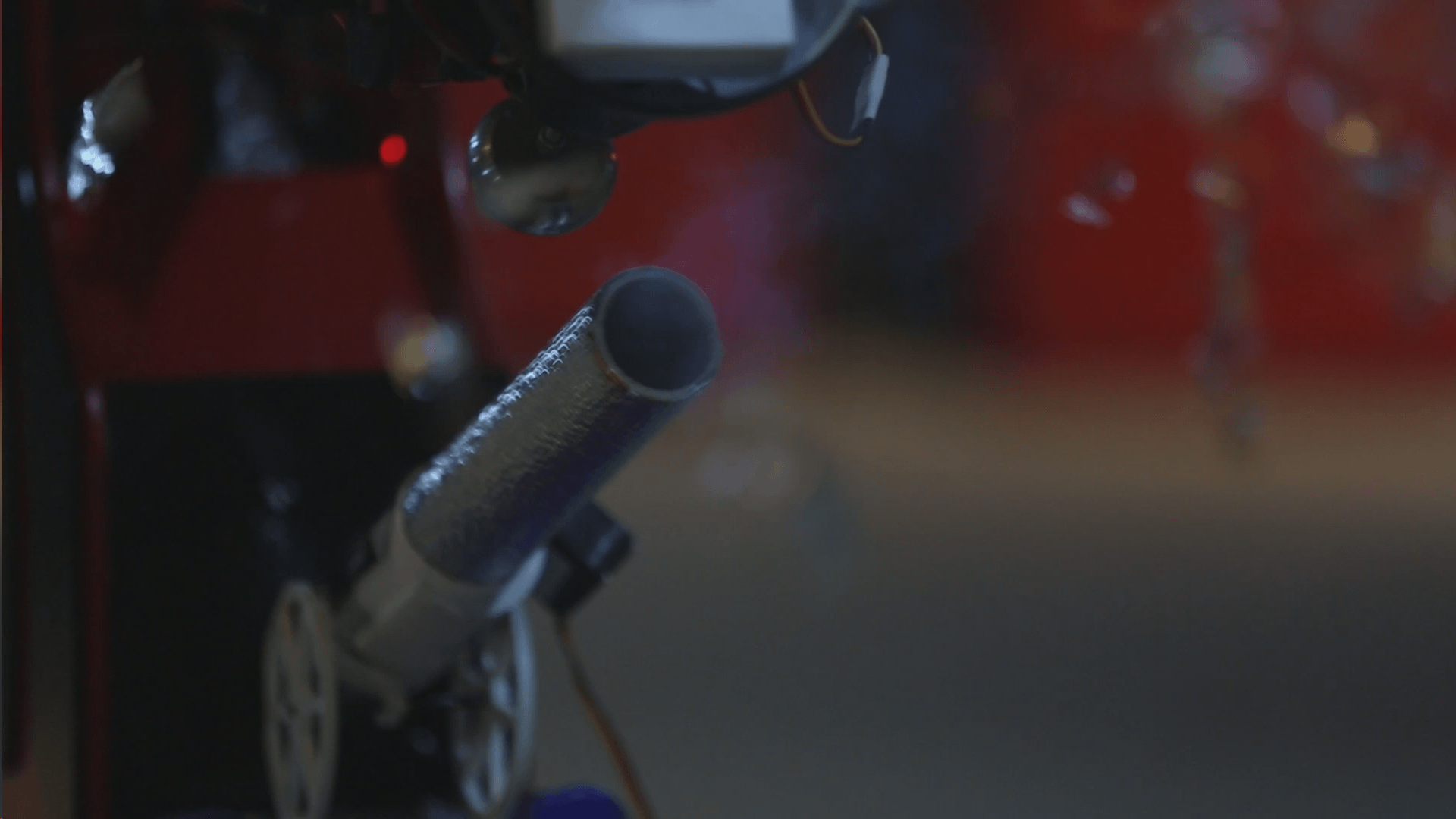
Ateşleme sistemi de gayet basit. Konfeti patlatacağımız için, tek yapmamız gereken, konfetinin üzerindeki butona basacak bir servo kolu, ve buna verilecek komutlardı.

TASARIM KISMI:

Güvenlik Robotunda verilebilecek çok fazla data ve detay var ancak ben bölüm bölüm bazı önemli noktaları anlatmanın daha doğru olacağını düşünüyorum.
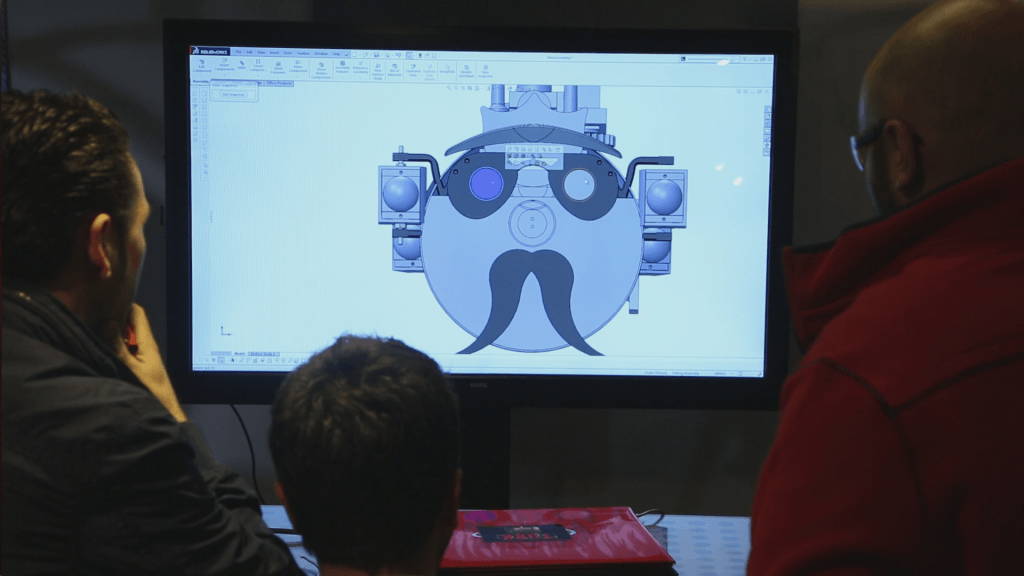
Masa lambası şasesinin orta noktasındaki Z ekseni bağlantısının ( gövdenin yukarı aşağı kalktığı kısım ), Masa lambası ampul yuvasının Pan Tilt mekanizmaları ve Kafanın görünen kısmı ( gözler, kulaklar, bıyık, burun v.s. ) Lambanın oyuncak kamyona bağlantı parçasının hepsinin datalarını tek bir step dosyasında topladım. ( Güvenlik Robotu Montaj 1.step )
Robotun yan ve üst pleksiglass süslemelerini en alttaki toplu dosyadan bulabilirsiniz.( UstPleksiler.step, yanpleksiler.step )


Robotun PIR sensör bağlantı kafasını ( E.T.kafası şeklindeki parça) STL dosyalarından görebilirsiniz. (Sensoryuva1.stl ,Sensoryuva2.stl, Sensoryuva3.stl)
Final sahnesindeki Konfeti patlatma mekanizması datasi. (Konfeti mekanizaması.step)
Önemli Notlar:
Öncelikle şunu belirteyim ki biz bu robotu yaparken elimizdeki masa lambasının profillerini şase olarak kullandık. O yüzden çoğu tasarım bu masa lambasının ebatlarına göre yapıldı. Aynısını bulamaz iseniz tasarımda revizyonlara ihtiyacınız olacaktır.
Bu ürünü yapabilmeniz için 3D printer a ihtiyacınız olacaktır. Tam olarak saymadım ama tahmini 50-60 parça var basılması gereken. Umarım 3D printerınız vardır veya 1.bölümü izleyip siz de kendiniz üretmişsinizdir.
Hadi kolay gelsin size : )
Robotun çizimlerini buradan indirebilirsiniz.
TEDARİK KISMI:




MEKANİK KISIM:

Özkan’ın kısmı yolda.
YAZILIM KISMI:
Evet, geldik işin en can alıcı kısmına. Bu kadar şeyi birbirine bağladık tamam da, şimdi bunları nasıl kontrol edeceğiz? Hem sensörlerden, hem kablosuz bağlantılardan veri okuyacağız, bu verileri yorumlayıp uygun algoritma ve kod kümelerini çalıştıracağız, ve çoğu zaman bunların çoğunu bir arada yapacağız. Çok kolay bir iş değil, ama anlatmaya başlayalım bir yerinden.
Öncelikle hemen kodu verelim, işin en zor kısmını bitirelim! –>> ROBOTUN KOD DOSYASI (*.ino)
Şimdi robotun en basitinden kendi kendisine dolaşabilmesi, karşısına bir şey çıktığında ona çarpmadan doğru şekilde kendini tekrar konumlandırarak engeli aşması gerekiyor. Pekala, bunu yapmanın en basit yolu da ses dalgalarını sonar gibi kullanmak. Robotun önünde gördüğünüz bu ufak uzaylının yaptığı iş de tam olarak bu. Servo motor yoluyla sağa ve sola bakıyor. 3 yönde ses dalgası atarak, o ses dalgalarından geri dönenlerin ne kadar bir sürede döndüğüne bakıyor, ve dolayısıyla önündeki 180 derecelik alan içerisindeki engellerin nerede olduğunu tam olarak biliyor! Yayınladığım kodun içerisine bakarsanız nasıl olduğunu görebilirsiniz.

Kamera sistemi ise apayrı bir zorluk. Tamam sonuçta yaptığımız iş görüntü ve ses aktarmak, ancak bunu nasıl yapacağımız burada çok büyük önem kazanıyor. Eğer görüntüyü bluetooth üzerinden aktarmaya kalkarsak iletişim sistemini bloke edecek kadar yormak bir tarafa, zaten inanılmaz düşük çözünürlükte olur. IP kamera kullanmamızın sebebi, ayrı bir kanaldan kablosuz bağlantımız üzerinden direkt internetteki sunucumuza canlı yayın yapmak. Aynı zamanda da ordan gelecek komutlarla, robotumuzun kontrolünü sağlamak. Raspberry benzeri bir sistem burada çok işimizi görür, fakat sistemi şimdilik daha da karmaşıklaştırmanın pek bir anlamı yok. Raspberry’yi biraz daha az elektronik ekipman ve daha kuvvetli yazılım desteği gereken durumlarda kullanmayı tercih ediyorum.
Bunu yapmanın da iki yolu var. Ya robotumuzun sistemi üzerinde bir sunucu olmalı ve biz buraya bağlanmalıyız, ya da sistem bir sunucuya bağlanarak oradaki komut dosyalarının değişimini takip etmeli. İlk yolu izlemek elbette çok daha mantıklı, fakat bu sefer de sistem karmaşıklaşacak. Diğer türlü de sistem hem hantallaşacak, hem de bant genişliği gereksiz yere doldurulacak.

Robotun yazılımını buradan indirebilirsiniz. Arduino’ya atın, konfigürasyonunu yapın, ve de sistemin düzgün çalışması için dua edin 🙂
Robotun kontrolü için yazdığım Android aplikasyonu da şuradan indirebilirsiniz. –>> ROBOJIB Android App (*.apk)
Kameramızdan aplikasyonumuza görüntü alabiliyoruz. Ancak bunun için kameranızın routerınız üzerinde olması gereken ayarlarını doğru yapmanız gerekir. Statik IP sahibi değilseniz de, bu sefer dyndns.org gibi bir servisten faydalanmanız gerekiyor. Ben öyle yaptım, robottan sadece atölye içinde değil, herhangi bir yerdeyken görüntü alınabilmesi önemliydi.
Ses dosyalarını SD kartınıza atmadan önce özel bir formatta encode etmeniz gerekiyor. Yoksa ya ses dosyalarının bir kısmını duyamazsınız, ya dosya başlangıç ve bitişinde çok rahatsız edici bir gürültü gelir, ya tamamen gürültü gelir, ya da en kötüsü hiçbir şey duymaz ve sorunda hangi aşamada olduğunuzu kestiremezsiniz. Benim tavsiyem ses dosyalarını karta atmak için Wav Sample Rate Converter programını kullanın, ve ses formatınız 8bit, mono ve 16khz olsun.
Şimdi, peki görüntü tamam da, robotu uzaktan nasıl kontrol edebiliyoruz. Uzaktan derken herhangi bir yerden. Bunu yapmak için 2 yöntem var, hatta 3. Biri en basiti, diğeri orta sonuncusu ise zor.
1. basit yöntemi anlatacağım burada, sonrasında diğerlerini. Ama çekimler bittikten sonra! Şu postu hazırlamak bile çok değerli 2 gecemi alıyor, hemen hafta sonu geliyor sonrasında ve çekimler başlıyor. Şimdilik affınıza sığınarak hızlıca geçiyorum.
1. yöntem, gerçekten basit, ama dedike 1 adet android telefon gerekiyor. İşlem çok basit. Dedike ettiğiniz telefon robota bluetooth algı mesafesinde olmalı, ev veya atölye için gayet yeterli. Bu telefona size sağlamış olduğum robot kontrol aplikasyonumuzu ve Teamviewer Quicksupport denen programı kurun. Eminim burayı okuyorsanız Teamviewer programını kullanmışsınızdır. Sonra da internet bağlantısı olan herhangi bir yerden bu telefona bağlanın ve robotu kontrol edin. Çocuk işi 🙂
Diğer yöntem de node.js, Eclipse, Php ve Arduino yazılımını beraber kullanmanız ile mümkün oluyor daha sonra anlatacağım. Zor olan yöntemde de Raspberry, Python ve Processing’e girmem gerekecek. Ne dediğimi anladıysanız bana hak vereceksiniz, sırf bunları anlatabilmem 1 hafta sabahlamam demek o yüzden bana biraz zaman verin, 2 aya kadar ilk sezon çekimleri bitecek.
Dediğim gibi burasını zamanla geliştireceğim, sorularınız ve takıldığınız yerler için lütfen postun tamamını okuyup sindirdikten sonra bana ulaşın, elimden geldiği kadar yardım etmeye çalışırım.
SON NOTLAR:
Robot süreci ilginç bir deneyimdi, fakat sonuçta ulaşmış olduğumuz noktadan gayet memnunduk. Artık ortalıkta dolaşan bir karakterimiz daha vardı. Ve gözümüz arkada kalmadan uyuyabiliyor veya mekanı terkedebiliyorduk. Pek Metin’in istediği gibi dostu düşmanı ayıramasa da (roborobocop gibi) onu yapmak da bir OpenCV’ye bakardı, ama işimize pek gelmedi gördüğünüz üzere!
Sonraki bölümlerde daha bomba projeleri anlatmak üzere yine burada olacağız.

Türk İşi ekibi sosyal medya hesapları:
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
17 Yorumlar on "Hırsız Avcısı 2015 – Bıyıklı Güvenlik Robotu Nasıl Yapılır?"
Woah! I’m really lonivg the template/theme of this site. It’s simple, yet effective. A lot of times it’s very hard to get that “perfect balance” between user friendliness and appearance. I must say you have done a amazing job with this. In addition, the blog loads super quick for me on Firefox. Exceptional Blog!
This really answered my problem, thanks!here on this post. I might be coming back to your blog for more soon.
Selam Murat abi iki sorum olacaktı, birincisi potansiyometre ile l298n deki dc motorları nasıl kontrol edebilirim? İkincisi, bende küçük dc motorlar var onları kontrol etmem için l298n e ihtiyacım var mı? Eğer ihtiyacım yoksa onları nasıl potansiyometre ile kontrol edebilirim.
Merhaba Melike. Normalde sadece potansiyometre kullanarak dc motor kontrol etmek çok verimli ve iyi bir metot değil. Enerjiyi kısmak yerine fazla enerjiyi direnç üzerinde ısıya çeviriyorsun çünkü. Ama illa kullanmak istiyorum dersen de potansiyometrenin yüksek watt olması gerekiyor, diğer türlü pot bozulacak ve yanacaktır. Bu değeri de motorunun watt değerini kullanarak hesaplayabilirsin. Doğru olan metot bir mikroişlemci, H-bridge (yani sendeki l298n) ve potansiyometreyi beraber kullanmak. İşlemci ile potansiyometre değerini okumalı ve motor sürücüsüne bu alınan değerler ile motorların nasıl davranmasını istiyorsan o komutları göndermelisin.
I simply want to tell you that I am just very new to blogging and absolutely liked this web-site. Very likely I’m want to bookmark your website . You surely have tremendous writings. Bless you for revealing your web page.
Abi sd kart modülünü evde kendimiz micro sd kartı mini sdye dönüştüren aparata jamper kabloloları lehimlesek ve arduinoya bi şekide bağlayabilirmiyiz yada bağlamak için bir devre şeması varmı
Şu şemayı kullanabilirsin. Ama çok da tavsiye etmiyorum bu tip direkt bağlantıyı, modül kullanmak en sağlıklısı.
Metin abi yaklaşık bu malzemelerin tutarı yaklaşık olarak ne kadar.
Merhaba suan tamamiyle çıkaramadım işlerim biraz yoğun facebook uzerinden bana ulaşırsan sana daha hızlı bilgi verebilirim 🙂
Abi ben tmrpcm ile müzik çalmaya çalışıyorum örnek kodu çalıştırıp seri olarak klavyeden değer girince müzik çalıyor fakat if else dallanmasını silip void loop içine tek başına tmrpcm. play(1.wav); yazdığımda çalışmıyor sorun nerde sence ve o transitör elimde olmadığı için kullanamadım sorun ordamıdır
Hayır, sorun kütüphanenin yapısından kaynaklanıyor. Çalışan ve çalışmayan kodu gönder ne yapman gerektiğini üstünde anlatayım.
İlk verdiğin örnekteki gibi bir koşul altına koyman gerekiyor.
abi şu HC-05 bluetooth modülünü tam ayaarlarını nasıl yapacağız? ayrıntılı olarak anlatır mısınız ? nedir bu slave mod master mod ????
Merhaba Deniz. Hc-05’leri birbiriyle haberleştirirken, birini master diğerini de slave yapıyoruz. Burada master yaptığımız tarama, diğer cihazı bulma ve bağlanma görevini üstlenecek, slave olan da bağlantı kabul edecek. Enerji alıp açıldıkları anda birbirlerine bağlanmalarını istiyorsan, bu modülleri AT Komut moduna aldıktan sonra AT komutlarıyla istediğin şekilde ayarlayabilirsin. Birini master diğerini slave yaptıktan sonra, autoconnect özelliklerini açman, master modülüne diğer modülün MAC adresini tanımlaman ve şifresini belirtmen gerekiyor.
Murat abi merhaba.Sizin güvenlik projesıne çok benzer bır projem var.Pc ye kablosuz canlı goruntu aktarmam gerekıyor.Acaba IP camera hakkında detaylı bir bilgi, link verebılır mısın ? Bırde bu kameranın beslemesını nasıl yapabılırım ? Tesekkur ederım :))
Ip kameralar çok çeşitli, internette pek çok model bulabilirsin. Sen mümkünse hd ve wireless almaya çalış. Biraz pahalı, ama 2. el uygun fiyatlara bulunabiliyor. Hd görüntüyü aktarırken çok düşük fps’lere inmen mümkün, bağlantı hızın önemli. Hele bir de görüntü işleme olacaksa.
Sorunu spesifik sorarsan daha net cevaplarım, yorumlarda fazla detaya inilmiyor doğal olarak 🙂
Bizim kameramız 5v ile besleniyordu, dolayısıyla robotu besleyen aküden 7805 voltaj regülatörü ile bir jak çıkarıp kameraya bağladım.