


Selamlar,
Yine yorucu bir haftanın ardından burdayız. Bu bölümde, hep Facebook’ta orada burada gördüğümüz biyonik el olayına merak sardık. Yapısı basit, fakat etkileyici bir ürün olduğunu düşünüyorum. Bir makineyi uzaktan yaptığımız hareketin aynısını yapacak şekilde kontrol etmek, hep insanın aklına süper kahramanları ya da bilgisayar oyunlarını getiriyor. Ve kullanması da inanılmaz keyifli bir ürün. Yapmak için yeter de artar bile!
Şimdi bu ürünü yapmanın 2 önemli aşaması var. Biri hareketli ve kontrol edilen mekanik kısım, biri de kontrol eden kısım. İkisinin de yapımını ve bir araya getirmenin yöntemlerini anlatmaya çalışacağız.
Malzeme Listesi:
- 2 x Arduino – Uno yeterli
- İster Xbee modül kullanın ister HC-05.
 2 Tane kullanacaksınız, biri eldivene, biri de ele. Biz Xbee ile yaptık, ama HC-05 ile de çalıştırdık sonra. Ama ikisi için de ayar yapmak gerekiyor. Yani biri master(yönetici) biri de Slave(yönetilen) modda olmalı. Bir de şu var ki, Xbee kullanacaksanız prototipleme kartına uygun kanallardan bağlamanız gerekiyor, ya da kolaya kaçmak isterseniz ve bütçeniz varsa Xbee shield kullanabilirsiniz.. Önemli not: HC05 modülü hem master, hem de slave olarak kullanılabilirken, HC06 sadece slave olarak kullanılabiliyor, bilginiz olsun. Alırken dikkat edin.
2 Tane kullanacaksınız, biri eldivene, biri de ele. Biz Xbee ile yaptık, ama HC-05 ile de çalıştırdık sonra. Ama ikisi için de ayar yapmak gerekiyor. Yani biri master(yönetici) biri de Slave(yönetilen) modda olmalı. Bir de şu var ki, Xbee kullanacaksanız prototipleme kartına uygun kanallardan bağlamanız gerekiyor, ya da kolaya kaçmak isterseniz ve bütçeniz varsa Xbee shield kullanabilirsiniz.. Önemli not: HC05 modülü hem master, hem de slave olarak kullanılabilirken, HC06 sadece slave olarak kullanılabiliyor, bilginiz olsun. Alırken dikkat edin. - 5 tane servo motor. Her parmak için 1 adet. Hangi çizimi kullanıyorsanız ona göre almanız gerekiyor, biz önce küçük SG90 Tower Pro’lar kullandık, ama arkasından daha fazla tork ihtiyacımız doğdu ve MGR996R’lere geçtik.
 Siz parmaklar üzerine yük bindirmeyecekseniz küçük servolar gayet yeterli.
Siz parmaklar üzerine yük bindirmeyecekseniz küçük servolar gayet yeterli. - Misina – Örgü misina kullanırsanız, daha sonra sıkışma ve kopma, atma gibi problemlerin önüne geçersiniz. En kötüsü tam işi bitirip denerken misinanın atması ya da kopması oluyor.
- Pil. Li-po süper olurdu ama pahalı bir çözüm. Eldiven için sorun yok, ama El için motorlara yeterli enerjiyi sağlamak gerekiyor. Yoksa sürekli sorun çıkaracaktır. O yüzden eğer MGR996R servo kullanıyorsanız, 7.2V civarı potansiyel farkı ve 2.5-3 A civarı akım sağlayabilen bir güç kaynağına ihtiyaç var. Önemli: Motorlara uygun güç vermezseniz titremeler ve istenmeyen rastgele hareketler görebilirsiniz. Sorunu başka yerde aramadan önce öncelikle uygun batarya ile deneyin. 2700Mah 6 adet pil ile rahat rahat sistemi çalıştırabilmeniz gerekiyor. Her zamanki gibi motorların çıkışına olabildiği kadar yakın bir noktaya 1000mf elektrolitik ve 0.1 mf seramik kapasitörleri paralel takmanızı, hatta sinyal ucuna da 220 Ohm civarı bir direnç koymanızı tavsiye ederim.
- 5 adet Flex sensör. Flex sensör, büküldüğünde direnci değişen bir sensör, dolayısıyla bu proje için çok uygun.
 Fakat çok pahalı olduğundan, biz kendi sensörümüzü yapma yoluna gittik. Bunun için ihtiyacınız olan şey ise asetat, 9B kurşun kalem ve yapışkan bakır şerit veya bakır ince plaka.
Fakat çok pahalı olduğundan, biz kendi sensörümüzü yapma yoluna gittik. Bunun için ihtiyacınız olan şey ise asetat, 9B kurşun kalem ve yapışkan bakır şerit veya bakır ince plaka. - Makaron – Sensörlerinizin boyutuna uygun çapta.
- Eldiven. Kışlık kalın eldivenleri tercih edin derim.
- 5 x 22 Ohm Direnç
- On/Off butonları tercihe göre.
- 3D printer. Biz el kısmının çizimlerini internetten indirerek printerda bastık. Eğer 3D printerınız yoksa şuradan ilk bölümü izleyebilir, şuradan 3D printer yapımı postunu okuyabilir ve ilk proje olarak ona girişebilirsiniz. Ya da basitçe 5 tane hortumu birbirine bağlayarak ve motorlar için altına bir kutu yaparak da basit bir prototip oluşturabilirsiniz.
KONTROL ELDİVENİ – Biyonik Eli Komuta Eden Kısım
Flex sensör bağlantısı:
Bağlantıyı aşağıdaki şekilde yapabilirsiniz.
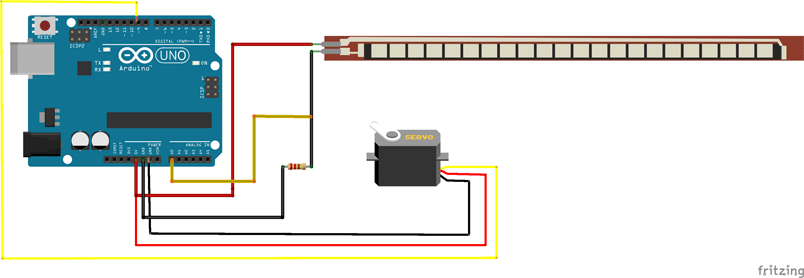
5 sensör kullanacaksınız ve her biri bir analog pine girecek, yani A0, A1, A2, A3 ve de A4. Motorları da dijital pinlere.
Kurşun kalemden Flex Sensör yapımı:
Anakart vb. cihazların içerisinde geldiği antistatik torbalardan bulursanız bu adımı atlayarak kurşun kalemle karalayacağınız sayfa yerine onu kullanabilirsiniz. (Velostat)

Bulamazsanız, kurşun kalem metoduna devam. Bir sayfa alın, ondan eldiveninizin parmaklarına uygun 2 cm eninde ve yaklaşık 10-12 cm civarında şeritler kesin. Bu şeritlerin bir yüzünü 9B kurşun kaleminizle iyice karalayın. Daha sonra da bu şeritlerin karalanmamış tarafından ikiye katlayın, yani karalanmış yüzeyler dışarı bakacak.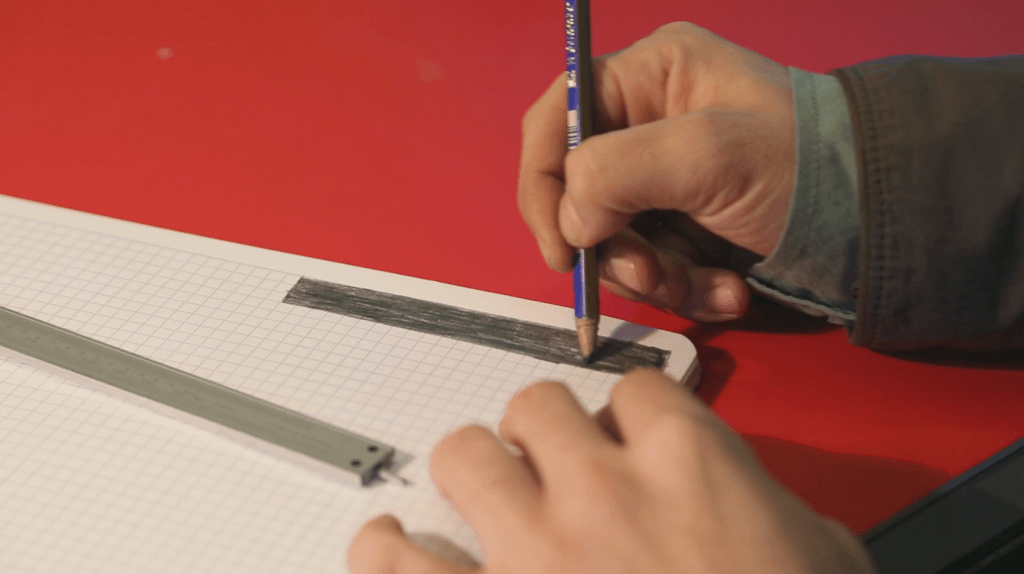
Sonra bakır plakanızdan da 2 adet aynı ebatlarda şerit kesin. Bunların birinin uç kısmına siyah, diğerinikine de kırmızı kablo lehimleyin. Bu iki plakanın arasına karalanmış kağıdınızı sandviçleyin. En dışına da makaron geçirdiğinizde, multimetrenizin problarını kablolara değdirip, ölçüm metodunu da rezistans yaptığınızda; sensörünüzü büktüğünüz zaman direncin değiştiğini göreceksiniz. Sonrasında, aynı yukarıdaki gibi bağlantılarınızı yapabilirsiniz.
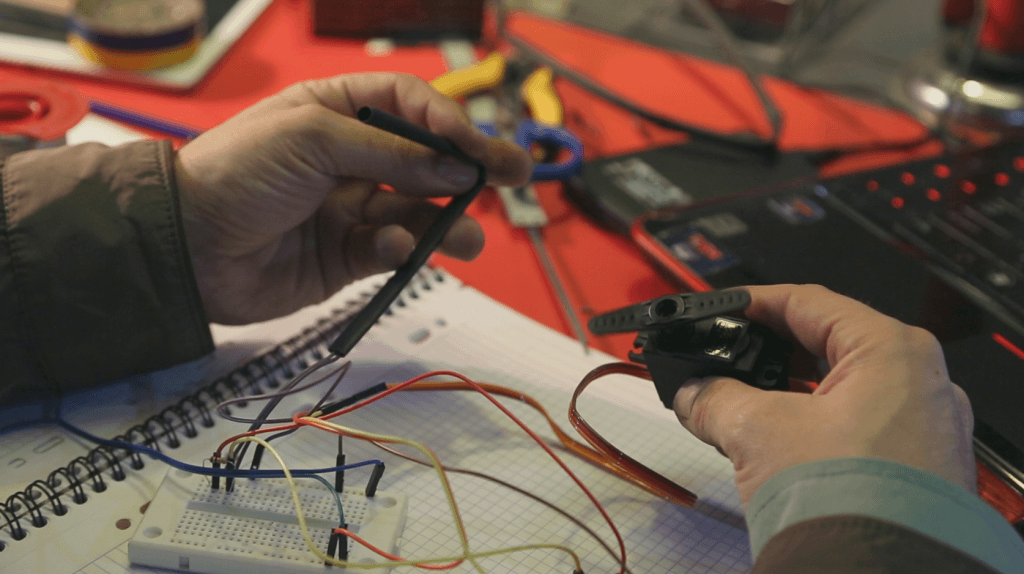
Ben sensörleri eldivenin üzerine diktim. Tabi sensörleri derken, sensörlerin içinde bulunduğu makarondan yapılma kabı sabitlemekten bahsediyorum. Kabloları da kola bant şeklinde takılacak bir kutuya ulaşacak kadar uzattım. Kutunun içerisine de Arduino ve 9V pil konulduktan sonra, kutu kapatılıp, 9V pilin + ucuna seri lehimlenecek bir on/off butonuyla sistem açılıp kapanıyor.

BİYONİK EL – Kontrol Edilen Kısım
Biyonik elin çizimlerini internetten bulduk. Gayet güzel modellenmiş el mekanik sistemleri bulabilirsiniz. Biz çok meşhur InMoov sistemini indirerek 3D printer ile bastık. Siz de dosyaları şu siteden indirebilirsiniz.
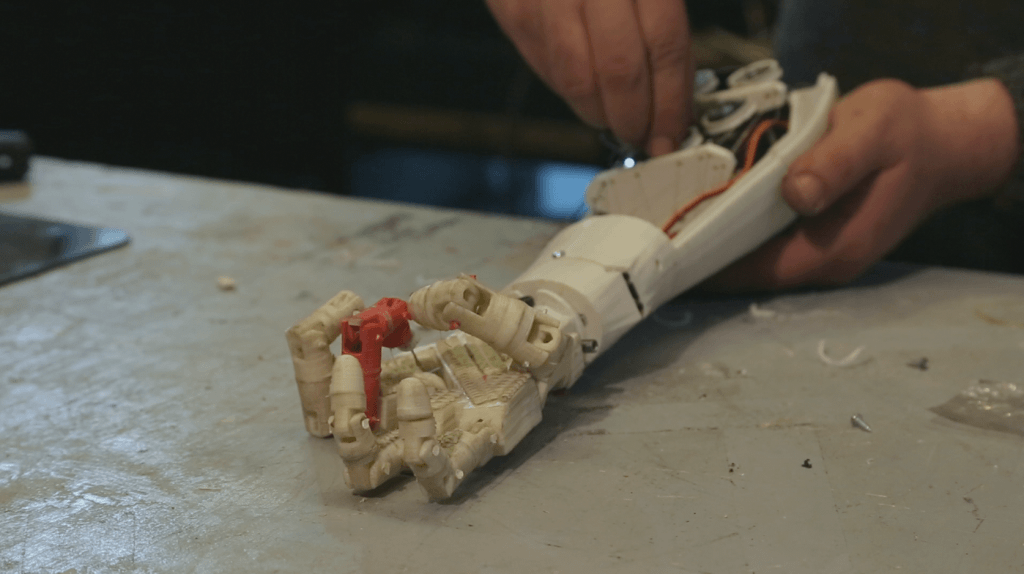
Motorları yerli yerine bağladık. Çizimlerde motor yerleri gayet net olarak belli. Motor flanşlarını da kullandığınız motorlara göre basmanız gerekiyor.
Burada işin en problemli kısmı, misinaların gergi ayarı olacak. Orası da Özkan’ın uzmanlık alanına giriyor. Elin ya tam sıkılmış, ya da tam açık halindeyken bulunduğu pozisyona göre ayarlarınızı yapabilirsiniz.
YAZILIM KISMI:
Yazılım kısmı aslında basit, hele robotla kıyaslanınca!
Burada aslında çok basit anlatımıyla yaptığımız şey şu. Eldivendeki sensörlerden aldığımız veriyi 0-180 derece arası bir değere oranlıyoruz. Bu değeri de kablosuz modül yardımıyla mekanik eldeki kablosuz modüle gönderiyoruz. Ve de elimiz, ona gönderdiğimiz değerlere göre servo motorları her parmak için ayrı ayrı gerektiği kadar çeviriyor.
Flex sensörlerimizi analog pinler üzerinden okuyoruz, dolayısıyla dirençlerinin değiştiği aralığı bilmek gerekiyor, her sensör için değişken olabilir. Özellikle de bizimki gibi ev yapımıysa. Bu sebeple yazılım içerisinde, sensörünüze göre bir skala belirlemeniz gerekiyor.
XBEE Uygulaması ve ayarları

Xbee kullanıyorsanız, Xbee özel yazılımını indirip master/slave ayarlarını yapmanız gerekiyor. XCTU yazılımını buradan indirebilirsiniz.

İndirdikten sonra ayarları için şu sayfayı kullanabilirsiniz. Unutmayın, 2 modülün de aynı Baud Rate’te olması, master/slave ayarlarının yapılması, ve de otomatik bağlantı için Mac adreslerini girişi yapılması şart.
HC-05 Ayarları

Bağlantı üstteki şekilde olacak, aynı şekilde master/slave otomatik bağlantı ayarları ve Baud rate ve Mac address tanımlamaları yapılmalı. Onun için de modülleri AT command moduna alıp gerekli ayarları girmeniz gerekiyor. O kısmı da robot postunda anlatmış ve linkini vermiştim.
EL YAZILIMI
El yazılımını buradan indirebilirsiniz. –>> biyonik_el_receiver
ELDİVEN YAZILIMI
Eldiven yazılımını buradan indirebilirsiniz. –>> Biyonik_el_sender
Devreleri kurup, hazırladığım yazılımı da Arduino’ya atın, yeni oyuncağınızla herkese hava atmanın keyfini çıkarın!
SONUÇ:
Biyonik elimizi kullanarak gördüğünüz gibi metalcilik yapmak ve dürüm yemek gibi nefis işler yaptık. Bir sonraki postumuzda da bu eli düşünce gücüyle nasıl kontrol ettiğimizi anlatıyoruz, merak edenler şöyle buyursunlar efendim.
Türk İşi ekibi sosyal medya hesapları:
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
87 Yorumlar on "Biyonik El Nasıl Yapılır?"
Murat abi elin mekniğine hangi sitede buldunuz
Internette inMoov diye arat, biz modeli şurdan indirdik -》 http://www.thingiverse.com/thing:17773
Burda kol kısmında eksik olan parçaları yokmu murat abi motor başlıkları yada motorları sabitlicek model parçalar ?
http://www.thingiverse.com/search?q=inmoov&sa=
gerçekten türkiyede bunların yapılıp 15 16 yaş arasındaki çocuklara sevdirdikçe biz bu orta gelir tuzağından kkurtulup tasarım ve arge faliyetlerimiz sonucunda gelişmiş ülkeler seviyesine bir adım daha yaklaşabiliriz tüm ekibe başarılar diliyorum.
Çok teşekkürler, inşallah öyle olacak. Bütün dileğimiz, temennimiz, çalışmamızın altında bu düşünceler yatıyor. Çok hevesli, meraklı, çalışkan ve zeki arkadaşlarımız kardeşlerimiz var ve onları gördükçe ekipçe daha çok motive oluyoruz.
Abi bu flex sensör yapımı o kadar işime yaradı ki çok teşekkürler.
I’ve been playing with py-openzwave for the past 2 weeks. Everything lokoed great until I discovered(more like got stock) that there’s no REMOVE NODE function. I’m sure I’ll figure it out eventually, but I guess I’m too lazy, so I was hoping I could get an advice from someone experienced in this area. I’m using Aeon ZStick S2, it supports hardware node add/remove by pressing a button on USB controller, but I’m looking at programmable way of doing it(I did mention that I’m lazy, right? Don’t like an idea of wondering around the house and doing extra clicks:) Thanks,Andrei
Abi elin iskeletini nasıl yapabilirim
3d printer dosyaları için link verdik, ama sanırım printerın yok. Bu durumda ya firmalardan dosyayı verip bastıracaksın, ya da daha basit bir formülle işi çözeceksin. Yani hortum kesip parmak yapacaksın 🙂
Merhaba Murat Abi ben 2 ay gibi bir süredir flex sensörleri yapmaya çalışıyorum fakar çalışıp çalışmadığını tam anlayamıyorum. Çalışıp çalışmadınığını anlamak için tek servoluk basit bir kodu nasıl yazabilirim acaba birde 5 adet mg90s servo var elimde parmaklara yük binmeyeceğinden uygun olur diye düşündüm seninde düşünceni almak isterim . 2. sezonu iple çekiyorum 🙂
Kodu yazmak basit aslında, sadece değeri okuyup map komutuyla istediğin hassasiyete getireceksin. Sonra da o değeri servoya göndereceksin. Şu an yurt dışındayım, 1 hafta sonra hatırlat bana buraya kodu ekleyeyim. Elindeki servolar uygun.
Abi tekrar merhaba Türkiye’ye dönmüşsündür diye umuyorum acaba kodu eklemen mümkünmü ? ek olarak elimde ölçü aletim yok o olmadan çalışıp çalışmadığını anlayabilirmiyim.(yani varda en ucuz olanından almıştım kullanmayı beceremedim)
orda robot kolda dosyalarında butun baskıları basıcakmıyız resımlerı varsa atabılırmısınız
Evet, linkteki dosyaların tamamını bastırman lazım.
Yapılan projeler ve bu projeleri bizlerle paylaşma fikri gerçekten muhteşem ben makine mühendisliği 1.sınıf öğrencisiyim çok isteyerek seçtiğim bir bölüm değildi ta ki sizleri görene kadar… sormak istediğim bu tür projeleri yapabilmek adına hangi yeterliliklere sahip olmak gerek örneğin tasarımların mekaniği ve yazılımı için hangi programlara hakim olmak gerekir bunun hakkında bilgi verebilirseniz gerçekten çok sevinirim projelerinizin ve başarınızın devamını dilemeyi de unutmayayım
Bu kadar hızlı dönüş yaptığın ve tavsiyelerin için çok teşekkür ederim murat abi umarım tavsiyelerinizle ve programdan kazandırdıklarınızla bir tasarım yapıp sizlerle de paylaşma imkanı bulurum yeni projelerinizi heyecanla bekliyorum 🙂
İnşallah 🙂 Projelerini bekliyoruz!
Merhabalar basit bir chipset yazılımı yapmak istiyorum en basti öğreni için hangi projeye bakamam gerekiyor. Şimdiden teşekkürler.
Merhaba, chipset derken, kastın mikroçip mi? Yoksa Northbridge-Southbridge mimarisini nasıl kontrol edebileceğin mi?
Murat abi mümkünse servo motorların nasıl bağlandığını anlatan şemayı yükleyebilir misin?
Bir de 1000mf elektrolitik ve 0.1 mf seramik kapasitörleri tam olarak nereye takmamız lazım?
Servolarin bağlantısı yukarıda anlatılıyor. Sarı sinyal kablosu Arduino pinine, kırmızı ve siyah kablolar enerji girişi. Kapasitorler kırmızı ve siyah arasına bağlanacak, servoya en yakın noktaya. Sinyal önüne de 220 ohm direnç bağlayabilirsin.
Abi günlerdir içimi kemiren bi konu var biz bu flex sensörü yapmak için iletkeni grafite sandviç yapıyoruz fakat direncin değişmesi grafitin o bölgedeki yoğunşuğunun değişmesiylemi alakalı iletkenin hareketleri sonucu konumundaki değişikliktenmi kaynaklanıyo kurduğum teoriler bunlar internette bununla ilgili yazı makale vs aradım fakat yok beni aydınlata bilirmisin yada post yapabilirmisin ve önerebileceğin bir kaynak varmı sağol..
Aslında kendi sorunu yanıtlamışsın 🙂 Bükme deformasyonu ile, metalin grafit ile olan yüzey temas miktarını değiştiriyoruz.
murat abi bizde proje olarak bunu farklı bi kaç sensor ile yapıcağız ancak kolun 3d baskısının tüm parçalarını inmoovdan tam olarak anlayıp bulamadık tüm 3d tasarım stl dosyalarını atabilirmisiniz
Şurada aradığınız bütün dosyaları bulabilirsiniz.
bu kodların bluetooth uyarlaması nasıl olacak? nasıl yapabiliriz? kodlarını paylaşabilirmisiniz?
Kodlar aynı kalacak, sadece modüllerin master/slave ve autoconnect ayarlarını yapman yeterli.
iyi günler ben flex sensörleri yaptım fakat 980 ve 1024 arası değer veriyor sorun karalamadamı daha stabil değerler için ne yapmalıyım
servo motor çok titriyor sebebi ne olabilir?
Selam Emrecan. Yukarıda malzeme listesini verirken bu noktaya 5. maddede değinmiştim. Tekrar yazayım.
Servo motorların titremesinin pek çok sebebi olabilir. En çok karşılaşılan durum, verilen enerjinin yetersizliğidir. Pil ile besliyorsan, pillerinin yüksek mAh olmasına dikkat et. Motorların için gereken enerjiyi hesapla (datasheetinde yazar), ona göre güç kaynağı seç.
Diğer sebebi sinyaldeki gürültüler olabilir. Arduino analog pinlerini (boş olanları) gnd’ye vererek çözebilirsin.
Motora yapabildiğin kadar yakın noktaya kapasitörler bağla (104 seramik ve 1000mf elektrolitik, yukarıda anlattım) Sinyal ucuna da 200 ohm direnç tak.
Bunları yaptığın zaman titremelerden kurtulabilirsin.
merhaba ben enerjiyi 2 adet 2000mah lityum-ion telefonpilini seri bağlıyarak sağladım fakat bunları nasıl şarj edeceğimi bilmiyorum direk 9v2000mah bataryayı taksam şarj olurmu ve elimde 400watt powersupply var onun çıkışınada bağlıyabilirim veya hiç olmadı bunu şarj etmek için bir devre filan varmı bana yol gösterebilirmisiniz şimdi lityum pilde şakaya gelmez patladımmı fena patlıycağının farkındayım iyi günler
O pillerin onaylanmış şarj aletleri ile uygun şekilde şarj edilmeleri gerekiyor! Buradan başka bir şey önermemi beklemiyorsun herhalde 🙂
Bu pillerin üzerinde sıcaklık sensörleri ve cut-off devreleri (belirli voltaj seviyesi altına düşmelerini engellemek için) ve voltaj bölücüleri bulunur. Tek hücreli olduklarından aslında normal yollarla şarj edilebilir, fakat dediğim gibi uygun şekilde kendi onaylı mekanizmalarıyla şarj edilmesi gerekiyor.
murat abi ben bu Flex sensörün bağlantısını anlamadım ama şu kablolar aynı yere mi balanıyor
Merhaba Yusuf, kafa karışıklığı yaratmaması için resmi güncelledim. Flex sensörler analog pinlere girecek 0-4 arası.
abi resim çok karışık kırmızı kablolar aynı pine bağlanıyor birde siyah kablodan sarı kablo çıkıyor yardım edermisin
Resimdeki gibi yapacaksın, kırmızı kablolar 5v’a giriyor, ortak lehimle tek pin yapacaksın. Siyah kablolar da her birinden ayrı ayrı çıkacak, ve a0, a1, a2, a3, a4 pinlerine girecek (her flex sensör kendi pinine) ve de bir direnç ile ek çıkarıp gnd’ye vereceksin. Resim çok açık aslında, ama istersen önce biraz daha basit projeler yaparak tecrübe kazan.
yağ abi bin bu hc-05 bt modulü diğeriyle nasıl eşleştirilir yardım edermisin
Fahrettin selam. Şu yazıda çok detaylı anlattım -> http://turkisitv.com/dusunce-gucu-ile-biyonik-el-kontrolu-nasil-yapilir/ İki modül için de aynı şey, sadece birinde AT+ROLE=0 yaparken, diğerinde AT+ROLE=1 yapman gerekiyor. Bu birini bağlanan, diğerini ise bağlanılan olarak ayarlayacak.
abi ben senin hc-05 leri dediğin gibi yaptım birbiriyle eşleştirdim ama filex sensörlere dokununce ilk hareket etti sonra etmedi neden olabilir
Hareket ettiyse bağlantı kurulmuş demektir. Şimdi biraz detay vermen gerekiyor. Hc-05’lerin üzerindeki ledler nasıl yanıyor bu esnada? Serial monitor’de ne görüyorsun?
3-5 saniye ara ile iki kere yanıyor ve aynı şekilde tekrarlıyor ama servolarhareket etmiyor neden olabilir
Bağlantıların yanlış olabilir. İki kere yanıp sönmesi modüller arası bağlantının kurulduğu anlamına geliyor. Bluetooth modüllerinin birbiri ile bağlantı kurup data aktardığını serial monitor’den doğrula.
İyi günler ben motorları beslerken 5 volt 3 amper adaptör kullandım 3 tane motoru sorunsuz çalıştırdı fakat 4. motoru çalıştırırken titremeye başlıyor acaba volt mu yetmiyor amper mi?
Aslında ikisi de, yükteyken adaptör voltajı düşüp akımı biraz kısıtlıyordur. Ve de 3 motor 3 amper çekmemeli zaten, orada da sorun var. Motorlar üstünde fazla yük olabilir, bozabilirsin.
Sisteminin özelliklerini yazman gerek.
Motorunun özelliklerine datasheetinden bak. Ona uygun bir güç kaynağı kullan. Multimetre ile ölçüm yaparak sistemin kaç amper kullandığına ve adaptörün (yükteyken) sağlayabildiği voltaja bak. Sisteme ihtiyacı olan enerjiyi sağlaman gerekiyor.
abi ben filex senrorlerle hreket ettiremiyom
Bağlantı hatası vardır. Ya da sensörlerin arızalı olabilir. Multimetre ile ölçerek kontrol etmelisin.
merhaba xbee modüllerinin haberleşmesi için verdiğiniz linkten pek faydalanamadım.Function set’teki xbee’lerden biri ”zigbee coordinator at” diğeri ”zigbee router at” mı seçilecek ? teşekkürler…
Pan ID’leri aynı olacak ve adresleri(my address) farklı.
ATDH’leri 0 ayarlaman gerekiyor. Son olarak da, ATDL(destination address low) olarak ikisine de birbirinin adresleri girilecek. Yani xbee1’in adresi 1 ve xbee2’nin adresi 2 ise, xbee2’nin ATDL’si 1 ve diğerininiki 2 olmalı.
Yani:
Birini Coordinator ve diğerini Router seçmelisin.
COORDINATOR :
Destination address high: ROUTER’ın serial number high değeri.
Destination address low: ROUTER’ın serial number low değeri.
ROUTER:
Destination address high: COORDINATOR’ın serial number high değeri.
Destination address low: COORDINATOR’ın serial number low değeri.
abi farklı servolar kullanınca kod farklı yazmamız gerekiyormu birde flex 2.2 inch veya 4.5 inch kullanınca kodlarda değişiklik olması gererkirmi
Farklı servolar için kodu değiştirmene gerek yok, fakat flex sensörler için her defasında kodda uygun direnç aralıklarını girmen ve kalibre etmen gerekir.
Abi ben tower pro sg90 kullanan olurmu micro servo diyo satın alacağım yerde şüphelendi kullanan olurmu
Olur, eğer ağır bir şeyler tutturmayacaksan sorun olmaz.
Birde program tekrardan başlarmı
Başlayacak, yeni sezon hazırlıklarına devam ediyoruz.
abi çoook teşekkürler çok iyi ilgileniyorsunuz gerçekten
Abi makaron yerine ne kullanilabilir
Pipet, kablo kılıfı vs gibi basit bir şey de kullanabilirsin. Makaronun güzel tarafı ısıtarak istediğin sıkılığa getirebiliyor olman.
asıl sorum onun etrafını siyah bantla şeklini bozmadan bağlasam olurmu
Bantla sorun yaşayabilirsin, hareket edebilmeli biraz malzeme içeride.
MERHABA MURAT ABİ BEN FLEX SENSÖR YERİNE 5 TANE 10K SÜRGÜLÜ POT KULLANIYORUM ANCAK BU YAZILIMLA PEK STABİL ÇALIŞMIYOR PROGRAMDA NE GİBİ DEĞİŞİKLİKLER YAPMAM LAZIM STABİL ÇALIŞMASI İÇİN
Bu programla çalışır, fakat kalibrasyon yapmalısın. Flex sensör kullandığımızda kısıtlı bir aralıkta çalışıyoruz. Sen yazılımda map komutunda ölçeklediğin aralığı potansiyometrelerle okuduğun değerler arasına getirmelisin.
Kalibrasyon yaptim 0-1023 degerine oranladim bosta dururken servo bazen konum degistirip sonra kendi konumuna geri donuyor
Servo sinyalinde gürültüler olabilir. Yukarıda nasıl giderebileceğini anlattım. Enerji girişlerine kapasitör ve sinyal hattına da direnç bağla.
abi lütfen kablolu için kod yazıp at bana.Araştırdım baya yok.Bilgimde yok kod yamayla ilgili.Kullandığım flex2.2 inch. Şu adreste var ama birşey anlamadım pek denedim olmadı bu adresteki şekilde
http://www.marcopucci.it/tutorial-arduino-12-robotic-hand/
lütfen
Tabi ki de ben yazıp sana atmayacağım 🙂 Senin yapman önemli, ben zaten yapabiliyorum!
Kablolu olan çok daha kolay, 5 tane servoyu kontrol edeceksin sadece. Önce ona biraz çalış, tek bir servoya nasıl hareket verdiğine. Sonra onu flex sensör ile kontrol et. SOnra da onu 5’e çıkar.
Çok sağolun ne zaman başlıyo program sizin sayenizde artık bende kod yazabilyorum
ne zaman başlıyacak ve hangi kanalda
Yeni sezon yeni yayın döneminde olacak, yine NTV’de olacak.
abi yazıcıdan cıkarttım malzemeleri aldım 5.6 cm flex sensör 2 hc-05 modul 2 arduino birleştirme kısmını tam nasıl yapıcam anlıyamadım verdiginiz el icin ve eldiven için olan kodlar bluetooth için hazırmı yani flex sensörleri ve servoları takınca direk atmıs oldugunuz programla calısırmı cok acil abi cvp verirseniz sevinirim
Selam İbrahim. Evet, her şeyi doğru bağlayınca çalışacak. Ancak kendi sensörlerinin değer aralığına göre kalibre etmen gerekecek koddaki değer aralıklarını. Biraz kurcalarsan anlayacaksın, anlamadığın yerde danış yine.
Hc-05’leri birbiriyle haberleştirmek için de birini master, diğerini slave olarak ayarlaman gerekiyor.
öncelikle teşekkür ederim abi su an deniycem flex 2.2 inc le deger alamıyorum onun harici bir sorum daha olucak servo motoru bagladıgımda kafasına göre 15-20 derecelik bi hareket yapıyo bunun sebebi nedir alttaki yorumdakilerde ismimi calmış 🙂
Değer alabilmen gerekir, ya sensör bozuk (genelde giriş pinlerinde problem olur açıkta olan ve zorlanan ana yer) ya da okuduğun pin veya okuma yöntemin yanlış.
Servo gndsini Arduino gndsi ile ortak bağlayacaksın.
Hala sorun devam ediyorsa üç seçenek var.
1. Kod hatalı.
2. Yeterli enerji almıyor motor.
3. Sinyal hattında gürültü var, kapasitörler ile filtreleme yapmalısın.
abi bizde yapmaya çalışıyoruz bu projeyi 3d çıktıları çıkarttık malzemeleri aldık ama flexi yapamadık düzgün bi değer alamıyoruz kara kalemle karaladığımız frexlerden bi değer aralığı alamıyoruz çok düzensiz değer veriyor onu da kullanamıyoruz nerde yanlış olduğunu anlayamadık velostat alsak düzelir mi sıkıntı yardımcı olabilir misiniz 🙁
Biraz ince işçilik gerektiriyor, diğer yorumları da okuduysanız oralarda yazdım nelere dikkat edilmesi gerektiğini. Velostat bulabilirseniz kesinlikle daha stabil çalışır. Bu şekilde yapacaksanız dediğim gibi biraz çıraklık dönemi olacaktır güzelini yapana kadar, deneme yanılmalarla doğru yolu bulacaksınız.
Abi merhaber herşeyi yaptım elimde bir flex sensör ve bir servo motor var (mg995) bluetooth baglantısını yaptım (hc-05 lerle) potansiyometre ilede kontrol ettim yazdıgınız programları attıgımda hiç bir tepki alamıyorum sadece bir flex ve servoyla denemek amaclı acaba pinlerimi yanlış baglıyorum 8nci pini a0 a1 a2 a3 hepsine bagladım nerde hata yapıyorum flex 2.2 kullanıyorum kodumu degiştirmem gerekli cok g
Merhaba Can. Diğer tarafa master bluetooth modül ile veri gönderdiğinde, slave bluetooth ile okuduğuna emin ol. Serialde okuyabilmen gerekir. MOdülleri AT moduna alarak gerekli ayarları yaptın mı?
Verdiğim kod benim sistemimi bire bir takip edersen geçerli. Başka bir sistemle yaptıysan ona göre değiştirmen gerekir.
kablolu birden fazla takınca kafayı yiyiyo nedendir
Enerji probleminden olabilir. Servolara yeterli güç verdiğinden emin ol.
En sık yapılan hata da servoların gndsini Arduino ile ortak bağlamamaktır.
abi flex sensör map degelerini nasıl ölçebiliriz ve yazılımdaki map degerlerini ölçüme göre nasıl degiştirebilirim örnegin 110 la 850 arası sonuc alıyorum ben
Değer aralığın çok geniş bu arada, tam aç-kapat olmuyor eldiven için yapıyorsan. Ona göre tekrar bir bak derim.
110 ve 850 arasını 0-9 arasına maplemek için:
servoValue1 = map(FingerV1, 110, 850, 9, 0);
Kablosuz robotik el projesiyle uğraşmaktayız.Servolar istediğimiz gibi hareket etmiyor.Normalde projede 4.5 inch kullanılmıs.Biz 2.2 inch kullandık.Map ayarını nasıl yapabiliriz.
Önce sensörü büktüğünde aldığın min-max değerleri ölçmen gerekiyor. Sonrasında koddaki map komutunda bu değerleri gireceksin.
map degerlerini nasıl ölçebiliriz ve yazılımdaki map değerlerini ölçüme göre nasıl degiştirebilirim ?
örnegin 20 la 90 arası sonuc alıyoruz.
Sensörü bağladığında analogread ile serial monitorden okuyabilirsin. Yazılımdaki map komutundaki ilk iki sayıyı kendi değerlerinle değiştir.