
 Nasıl Yapılır?")

Selamlar!
Bu hafta biraz geç girebildik yazıyı, kusura bakmayın. İşler çok yoğunlaştı artık, ve bununla beraber yazıları yetiştirmekte de fark ettiğiniz üzere biraz zorlanmaya başladık. Neyse, El Clasico, çekimler sonunda detaylandıracağız 🙂
Şimdi, bu hafta herkesten gelen yoğun istek üzerine sizleri kıramadık ve drone yapımını anlatalım dedik. Ama yok ben bunla uğraşamam daha basit bir şey yok mu diyenleri programda gösterdiğimiz ornithopter (kanatlı mekanik kuş) kısmına alalım!
Drone dediğimiz şey, aslında yapımı çok basit (haftaya ne demek istediğimizi daha rahat anlayacaksınız) ama çok da zor aynı zamanda. Yani bakarsak çok atla deve değil, artı şeklinde bir şase ve bunun üzerindeki elektronik. Ama tabi çok önemli bazı öğeler var, bunlara dikkat etmezsek sağa sola çarpıp daha uçuramadan kırdığımız bir drone’umuz olur elimizde.

Bu sistemin en çabuk zarar gören parçası her uçan cihazda olduğu gibi pervane (propeller). O yüzden alırken yedekli alın, değişik boylardaki pervaneler farklı thrust(itim ya da itici kuvvet, bizim için en önemli değerlerden biri) değerlerine sahip olacak. Birkaç çeşit alıp denemeler yapın. Biz 3D printerla yaptığımız drone için bir de kanat koruma koyduk, ne olur ne olmaz.
Evet gelelim can alıcı noktasına. Çıtadan bile şase yapılır falan da, malzemeyi nasıl seçeceğiz? Yani motoru neye göre hesaplamalı, hangi pili kullanmalı? Pervane dedik güzel de 1045 yazıyo o ne? 0845 olsa olmaz mı? Kumandayı kaç kanal almalı? Esc’sini nasıl seçmeliyim vs vs uzar da gider.
Malzeme listesini verelim, sonra detaylara girelim.
MALZEME LİSTESİ
- Kontrol kartı Biz KK2 kullandık. Bu bizim drone’umuzun beyni. Yani üzerinde alıcı girişleri, güç giriş çıkışları, esc çıkışları, sensörleri (akselerometre, jiroskop vs), lcd paneli olan, içinde yazılımı yüklü olan ve sistemi yöneten ana kumanda kartımız. Şimdi önemli soru şu, bunu biz Arduino veya benzeri bir kart kullanarak yapamaz mıydık? Tabi ki de yapabilirdik (ki yaptık duramadık, başka bir postta vereceğim kodu vs). Ama burada şu devreye giriyor. Biz Arduino’yu neden kullanıyoruz ki? Kristal osilatörünü, voltaj regülatörünü, Atmega’sını, direncini kondansatörünü bağlayıp pinleri dışarı verip bir prototipleme kartı yapamaz mıyız? Hatta daha ileri gidelim, kapasitör niye kullanıyoruz ki, kendimiz cam süt şişesini alüminyum folyoyla kaplayıp içine tuzlu su koysak bakır tel daldırsak olmaz mı 🙂 Hatta cam şişeyi niye kullanıyoruz ki, deniz kumundan… Tamam. Biz eğer “maker” isek yapmamız gerekir, ama bazen de işi çabuklaştırmak da gerekir. Aynı daha önceki postlarımızda anlattığımız gibi, step motor sürücüsü almamıza gerek yok, basit bir entegre+regülatör+devre elemanları vs ile işi çözebiliriz. Ama kompakt ve düzgün çalışan bir sisteme ulaşmamız için biraz vakit harcamamız gerekir. Vakit de bizim için en kıymetli şey, bunu unutmayın. Önce çalışan bir prototipi yapıp, sonra parçalarını tek tek vakit buldukça kendi imalatınız olan ürünlerle değiştirip yaparsanız; hem hata payınızı düşürürsünüz, hem de sistemi çöze çöze ilerledikçe git gide artan tecrübenizle çok daha verimli çalışabilirsiniz. Naçizane önerim 🙂

- 4x 30A Brushless ESC Yani Electronic Speed Controller. Biz 30A Brushless ESC kullandık, çünkü seçtiğimiz motorlar da brushless ve yüksek KV. Alırken dikkat edin. 20A ya da 25A da kullanabilirsiniz, kullanacağınız motorlara göre değişir. Küçük bir drone yapıyorsanız o kadarına bile gerek yok. Bu minik birimlerin içerisinde kendi yazılımları var. Ben bu ESCleri aldıktan sonra kullandım ve performansları çok hoşuma gitmedi, içlerindeki entegrelere minik 4 tane lehim atarak SimonK Firmware yükledim. Performansını çok arttırdığını söyleyebilirim. Biraz cerrah işi, eğer ellerinize çok hakim değilseniz hiç bulaşmayın derim. Detaylar yine sonra.

- 4x Brushless DC motor. Bu da iyi hesaplanması gereken bir değer. Şimdi basitçe şöyle. Motorları seçerken bizim için en önemli değer KV denen değer. Yani Volt başına RPM. Bu bizim drone’umuzun thrust değerini belirliyor. Arabadaki beygir gücü gibi düşünebiliriz. Burada vereceğim tüyo şu: Drone’unuzun toplam ağırlığını hesaplayın (her şey dahil, kamera vs de koyacaksanız ekleyin) Diyelim ki 2kg(yuh!) Sonra bu değere %15-20 civarı bir pay ekleyin = 2.4kg Bunu 2 ile çarpın ve de 4 motora bölün. Yani 4.8/4=1.2kg=1200 gr. İşte sizin alacağınız motorun minimum KV değeri bu olmalı. Çok paylı paylı koydum tabi 🙂 Yani pratikte 980 KV rahatça kaldırıyor diyebilirim. Ama hover yapacaksa siz yine de benim gibi bu payı koyun, sonra üzülmeyin.

- 4x Pervane Biz 1045 kullandık. Pervane seçimi de önemli, çünkü motorlardan gelen rotasyonel kuvveti drone eksenine dik kuvvete çeviren birimlerimiz bunlar. Bunlardan 2’si başka tip, 2’si başka. Yani drone’umuzun 2 motoru saat yönüne dönerken, diğer ikisi saat yönünün tersine dönüyor ya, işte bunlara takacağımız pervaneler de ona göre farklı. Üzerlerine bakarsanız örneğin ikisinde 1245 yazıyorsa, diğer ikisinde 1245R yazmalı. Burası çok önemli. Sonra da tabi bunu kontrol kartı üzerinde ayarlamanız gerekiyor. Buradaki rakamlar şu anlama geliyor: 1245 şu demek kanat boyu 12 inch(30.48 cm) uzunluğunda ve ‘pitch’ değeri (bir rotasyon için aldığı yol değeri) 4.5 demektir.

 Yüksek pitch değeri daha yavaş dönme anlamına gelecek tabi. Ama aynı RPM değerlerinde araç daha hızlanacak, fakat bu sefer de daha çok güç harcayacak. Yine aynı şey kanat boyu için de geçerli. Kanat boyu çok uzun olduğunda da alet çok zorlanacak ve bir noktadan sonra yerden bile kalkamaz duruma gelecek.
Yüksek pitch değeri daha yavaş dönme anlamına gelecek tabi. Ama aynı RPM değerlerinde araç daha hızlanacak, fakat bu sefer de daha çok güç harcayacak. Yine aynı şey kanat boyu için de geçerli. Kanat boyu çok uzun olduğunda da alet çok zorlanacak ve bir noktadan sonra yerden bile kalkamaz duruma gelecek. - Kumanda+Receiver Bizde 2 tip vardı, Turnigy 9x ve 5x, Normalde 5x yeterli fakat kamera takacağımız için onun yönlerini ayarlamaya ihtiyacımız vardı, ordaki 2 servonun kontrolü için 2 kanala daha ihtiyacımız vardı. O sebeple kameralı olanı 9x ile kontrol ediyoruz.

.jpg)
- Li-po pil Geldik son maddeye. Bu da önemli çünkü sistem bütün enerjisini bu pil üzerinden alacak. Diğer değerleri dengeledik diyelim, iyi bir uçuş süresi için iyi bir pil şart. Pilde de 2 önemli faktör var. Birinci faktör tabi ki ağırlığı, ne kadar çok mah(miliamper/saat) o kadar uzun uçuş süresi, bir o kadar da ağırlık(ve de fiyat) demek. Ne kadar ağırlık, o kadar motor Kv ve propeller hesapları demek. Ve de ağırlaştıkça aynı hız değerlerinde daha fazla güç harcanacak pil daha çabuk bitecek. Döndük mü başa 🙂 Neyse moral bozmak yok, sonuçta bizim gibi bir drone yapıyorsanız, motorlar yeterince kuvvetliyse, propeller seçimi doğruysa 200-300 gr toleransınız olacaktır sistemde merak etmeyin! Biz burada bilgi vermek amaçlı yazıyoruz bu kadar detayı, yoksa bir şekilde uçacaktır sisteminiz sonuçta 4 kanat var sistemde 🙂 İkinci faktör akım dağıtma kapasitesi. Bu pillerin üzerinde mesela 20C, 25C gibi değerler yazar. Bunu çarpanı gibi düşünebiliriz. Yani 3050 mah 3s bir pilimiz var ise ve de 25C ise, bu pilin anlık akım verebilme kapasitesi 25*3050=75A gibi bir değerdir. Yani toplamda bu kadar akımı sisteme anlık olarak sağlayabiliyor demektir. Dolayısıyla sizin motorlarınızın güç ihtiyacına göre hesaplama yaparak nasıl bir pile ihtiyacınız olduğunu belirleyeceksiniz. ESC’lerin yüksek amper olmasında sorun yok, ama düşük olması sorun, onu belirteyim.

Sonuçta anlatacak o kadar çok şey var ki, dediğim gibi kolay gözüken zor olan bir konu. Yani motoru seçerken şöyle düşünün, motorların verimliliği yüksek olmalı, fazla ısınmamalı. Kanatlar ne kadar büyük o kadar iyi diye bir şey yok. Optimum değeri bulmalısınız. Küçük kanat, düşük RPM çoğu zaman daha iyi çalışıyor. Pili de hesaba katın. Kanat büyüdü, motorlara yük bindi, daha çok pil harcanıyor ama daha hızlı yükseliyor, fakat ani hareketlerde yavaş. Küçük kanatla daha atik bir drone olur ama bu sefer de hız faktörü var vs. vs. Olay en doğru değeri yakalamak. Kanat-motor-pil dengesini çok iyi kurmalıyız ki maksimum verimi alalım. Bunun için de daha malzeme listesi aşamasında nasıl bir drone istediğimize karar vermeliyiz. Ağırlığı ne olacak, hızlı atik olup taklalar mı atsın, bakkaldan bize kola mı alsın bunları iyi belirleyip alışverişimizi ona göre yapmalıyız.
Şimdi bağlantı kısmı kolay hızlıca geçiyorum. Dikkat etmeniz gereken en önemli nokta, ağırlıkları dengeli olarak dağıtmak. Sistemin ağırlık merkezi ortaya gelecek, yoksa bazı motorlara daha çok yük binecek demektir. 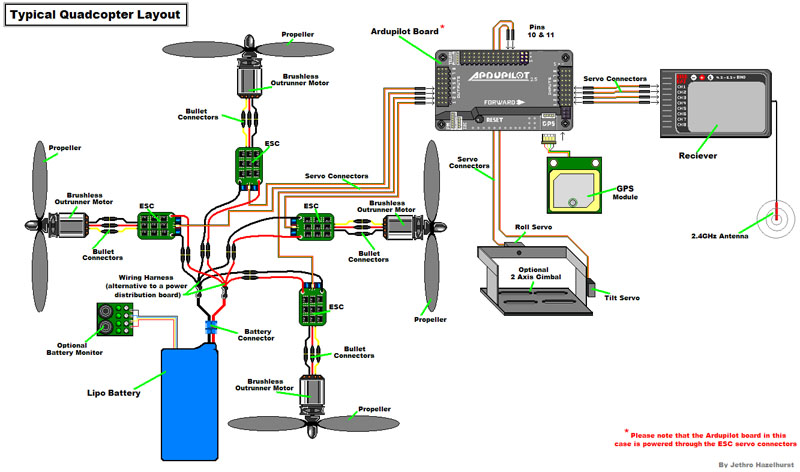
Peki seçtik malzemeyi, bağladık ettik sonra? Hadi uçuralım bakalım 🙂 Bir kaldırdık sağa gidiyor, hani bu ne güzel dümdüz yükselip havada duruyordu yahu?
İşte en önemli kısım. Ayarlar. Önce doğru ayarları yapmamız lazım. Çok fazla vaktim olmadığından yine hızlıca size bir fotoğraf koyacağım. Üstünde sırasıyla 13 maddelik bir ayarlar sıralaması var. O sırayı takip ederek ayarlarınızı yapın. Malum anlatacak çok şey var, daha vakumlu şekillendirme kısmına bile gelemedik. Bizi bir süre daha idare edin, 1-2 aya kalmaz bütün detayları vereceğiz. Sorular yine yorumlara lütfen, cevaplardan herkes faydalansın, şimdilik böyle ilerleyelim. Yazdıklarımı tekrar okuyamadım bile, yazım hatalarında da uyarırsanız sevinirim 🙂

Bu ayarları yazıya da döktüm, aşağıdan bakabilirsiniz.
HER ZAMAN İLK ÖNCE KANATLARI ÇIKARIN! Burası çok önemli, bu yüzden pek çok yaralanmalar yaşanıyor. Bana olmaz demeyin sakın, oluyor 🙂
KK 2.0 SK 450 AYARLAR
1- Önce menüden ‘Factory Reset’ yapın.
2- Sensörlerin çalıştığına emin olun. Ekranda ‘Sensor Check’ var onu yapın. Drone’u düz bir yüzeye koyun. Burası önemli. Düz zannettiğiniz bir yüzey değil, su terazisiyle vs. bakarak düz olduğunu bildiğiniz bir yüzeye koyun. Sonra ‘ACC calibration’ yapın.
3- Self level = AUX
Link roll pitch = YES
Auto Disarm = YES
CPPM enabled = NO
4- Misc settings altından şu ayarları yapın:
min. throttle = 10
Height Dampening = 0
Height D.Limit = 30
Alarm 1/10 Volts = 105
Servo filter = 50
5- Load motor layout = Quadcopter x Mode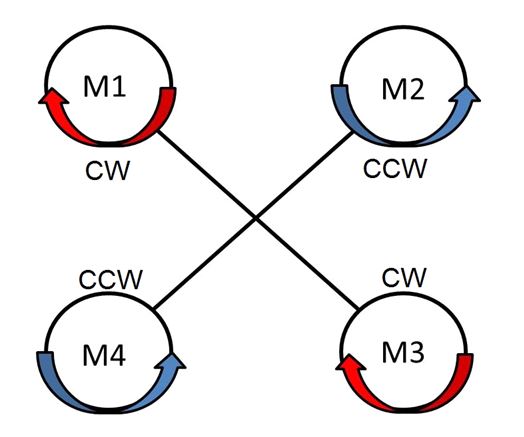
6- Receiver Test
Ail: 0
Elev: 0
Throttle: 0
Rudder: 5
AUX: -125 ort
7- Gerekirse, kanalları ters çevirin. (Invert Channels)
8- 4 kanalı da 0’a ayarlayın.
9- PI Editor
Axis: Roll (Aileron) <=> pitch İkisi de aynı olacak.
P gain = 30
P limit = 100
I gain = 0
I limit = 20
10- Self level settings
P gain = 70
P limit = 20
ACC trim roll: 0
ACC pitch roll: 0
11-
- Throttle’ı en yukarı çekin.(Full throttle)
- 1 & 4 tuşlarına aynı anda basılı tutun.
- Sonrasında pili takın, esc’lerden 2 kısa bip gelecek.
- Throttle’ı tekrar 0sıfıra çekin, 1 kısa bip sesi gelecek.
- Butonları bırakın.
12-
- Motorları çalıştırın. Hepsinin aynı anda dönmeye başlaması gerekir. Dönmüyorsa kumanda üzerindeki trimler ile ayarlamaya çalışın. Beni biraz uğraştırdı, tam istediğim verimi alamadım. Ben de ESC firmware’lerini flash edip ‘SimonK’ yazılımını yükledim.
- Motorların şu şekilde dönmesi gerekiyor:
! Eğer ters dönen varsa, bağlı olduğu Esc üzerindeki herhangi 2 kablonun yerini değiştirin.
13- %50 throttle uygulayın, drone’u yerden alıp sağa sola oynatın. Aşağıda kalan motorun daha hızlı dönmesi gerekiyor.
Son not, yukarıdaki temel ayarların ardından, kumanda üzerindeki ‘trim’ leri kullanarak sistemi stabil hale getirebilirsiniz. Yani sağa gidiyorsa biraz sola ‘trim’leyerek sistemi dengeleyebilirsiniz!
Haftaya görüşmek üzere 🙂
TASARIM KISMI

Selamlar.
Bu bölümde 2 farklı drone tasarımı yaptık.
Bir tanesi benim tasarladığım 3d printed olan. Diğeri de vacuum forming ile üretilen, mutfak gereçlerinden kalıbı yapılan, Özkanın uğraştığı şase.
Kendi yaptığım datayı aşağıda ekte step formatında görebilirsiniz.
Parçaları ABS den basarsanız daha iyi olacaktır. %20 infill ile basabilirsiniz.
Türk İşi ekibi sosyal medya hesapları
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
208 Yorumlar on "Drone (Quadcopter) Nasıl Yapılır?"
3B çizim dosyasını koyabilir misiniz? Bir de yazıcıda çizim hangi ayarlarda basılmalı?
Selam Seçkin.
En geç Cumartesi gününe kadar 3mm ve 2mm kalınlıkta olmak üzere 2 farklı tasarımı siteye eklemeyi planlıyorum. Print detayları da veririm.
Fatih
Aceleye gelmiş haliyle bile çok çok iyi Türkçe kaynak. Teşekkürler!
Abi yeni keşfettim programı fakat çok hoşuma gitti umarım uzun soluklu bir proje olur
abi toplam maliyet ne kadar
Genelde maliyet vermiyoruz kafa karışıklığı olmasın diye, sonuçta bu post burada hep duracak ve fiyatların sürekli revize olması gerekecek. Bir de çok değişiyor tabi dükkandan dükkana. Parça listesini verdiğimiz için araştırıp bulman 5 dakikanı almaz.
Eğer bu drone’u yapmak istersek altına kamera için 3 eksen gyro’yu nereden temin edebiliriz veya nasıl yapabiliri
Eğer satın alacaksanız 3 eksen gimbal bir çok yerde mevcut.
Yapmak isterseniz gelecek sezonu beklemeniz gerekecek.
🙂
murat abi siz programi finalmi yaptınız
Programın sezon finalini yaptık. Ve kısa bir araya girdik.
Yeni sezonun başlama tarihi ile ilgili bir bilgi verebilme imkanınız var mı peki?
Belli olunca bilgilendireceğiz. Şu anda seminerlere, üniversite ziyaretleri ve etkinliklere yoğunlaştık. Sonrasında projelere başlıyoruz.
drone yapımıyla alakalı çok başarılı bir çalışma geliştirdiniz, 1. sınıf mekatronik öğrencisi olarak projelerinizi imrenerek izliyorum. gerçekten çok başarılılar. bu projeyle alakalı bir sorum olacak kamera gimbal’ini hazır almak mı lazım yoksa onu da kendimiz mi yapmalıyız hazır alacaksak önerileriniz var mı? geçekten çok teşekkürler
Biz ekip olarak yapmayı, hazır almaya tercih ediyoruz. Ama bu biraz da imkanlarla alakalı bir şey. Eğer çevrenizde sizin eksiklerinizi tamamlayacak, iyi anlaştığınız arkadaşlarınız varsa yapmayı deneyin derim. Ama uğraştırıcı bir süreç şimdiden uyarmalıyım.
Genel olarak bir marka model tavsiyesi vermiyoruz, araştırıp bulmanız gerekecek.
Murat abi, el ile başka biyonik el yerine quadcopteri kontrol edebilir miyim ?
Ramazan merhaba. Eldiveni kastediyorsun sanırım. Edebilirsin tabi. Sonuçta o da bir kumanda görevi görüyor. Tabi bluetooth ile veri gönderdiğin için quadın alıcısının da bluetooth protokolünü desteklemesi gerekiyor. 5 farklı komut verebildiğin için kontrol etmekte bir sorunun olmaz, ancak bence eldivene akselerometre+jiroskop da ekleyerek geliştirmen çok daha iyi sonuçlar verebilir 🙂
Bu maketini biraz dağa küçüğ ü için ne kaç voltluk motor ve pil kullanabiliriz ben berkant 14 yaşindayim
Merhaba Berkant, sana kalmış aslında. 6v motorlar da iş görür ama modeline bağlı. Yukarıda bahsettiğim KV değeri senin için önem kazanıyor bu durumda. Sisteminin ağırlığına göre Volt başına RPM gerekliliğini hesaplayarak uygun motoru seçebilirsin.
Abi teşekürler bir mtor buldum serçe parpağımdan daha küçük ve kV değeri 1100 nasıl olur berkant
Bana sorarsan, ağırlık hesabını yapmadan motor seçmemelisin.
Hocam aşağıda linkini verdiğim parçalar uyumlu ve nasıl bir drone olur?(Gücü hızı vb.)
Motor: http://www.aliexpress.com/item/DYS-BE1806-2300KV-Brushless-Motor-Black-Edition-for-Multicopters/32293794998.html?ws_ab_test=201407_1,201444_6,201409_4 veya http://www.aliexpress.com/item/4X-EMAX-MT2204-2300KV-Motor-F-Mini-Multirotor-Quadcopter-Multirotor-QAV250-280/32398375788.html?ws_ab_test=201407_1,201444_6,201409_4
Pil: http://www.aliexpress.com/item/ZOP-Li-poly-Li-on-Lipo-Battery-10000mAh-11-1V-25C-3S-XT60-Plug-For-RC/32309032931.html?ws_ab_test=201407_1,201444_6,201409_4
Bunlar eğer uyumluysa nasıl bir pervane öneririsiniz? Şimdiden teşekkürler, iyi çalışmalar.
Pil biraz ağır (600 gr) Ama motorların da ona göre kuvvetli (2300 KV). Postta yazdığım gibi toplam ağırlık hesabını yap, drone atik mi olsun, hızlı mı yükselsin, stabil mi olsun ona karar ver. Pervane seçimi en son, ona göre yapılacak 🙂
projeleri ne zaman güncelleyeceksiniz bazı ince ayrıntıları merakla bekliyoruz
Şu an tatilde ekip, dönünce tam gaz çalışmaya başlarız 🙂
Hocam, öncelikle cevap verdiğiniz için çok teşekkürler. Motorların kv değerini düşürdüm biraz. Sistemin her şey tamam son hali şöyle:
Motor:http://www.aliexpress.com/item/Brand-EMAX-XA2212-980KV-Outruner-Brushless-Motor-w-Prop-Adapter-and-Accessories-for-DJI-F450-F550/32340097644.html?ws_ab_test=201407_2,201444_5,201409_1
ESC:http://www.aliexpress.com/item/free-shipping-4pcs-lot-Simonk-10A-20A-30A-40A-Firmware-Electronic-Speed-Controller-ESC-for-RC/32402581284.html?spm=2114.01020208.3.36.qbnyas&ws_ab_test=201407_1,201444_5,201409_2
Batarya:http://www.aliexpress.com/item/ZOP-Li-poly-Li-on-Lipo-Battery-10000mAh-11-1V-25C-3S-XT60-Plug-For-RC/32309032931.html?ws_ab_test=201407_1,201444_6,201409_4
Batarya alternatif:http://www.aliexpress.com/item/LION-POWER-3S-11-1V-5200Mah-30C-MAX-40C-XT60-Plug-RC-Helicopter-Battery-Lipo-battery/32432023680.html?ws_ab_test=201407_1,201444_5,201409_5
Pervane:http://www.aliexpress.com/item/Shaft-rotor-10-pros-and-cons-of-propeller-1038-paddle-2/1781857118.html?spm=2114.01020208.3.1.mFHzfv&ws_ab_test=201407_2,201444_6,201409_5
Uçuş kontrol ünitesi:http://www.aliexpress.com/item/Original-DJI-Naza-M-Lite-Multi-Flyer-Version-Lite-Flight-Control-Controller-w-PMU-Power-Module/32437436396.html?ws_ab_test=201407_2,201444_5,201409_4
Alıcı-verici:http://www.aliexpress.com/item/100-original-CT6B-2-4Ghz-6CH-Transmitter-w-FS-R6B-Receiver-For-RC-DIY-quadcopter-mini/32430836879.html?ws_ab_test=201407_1,201444_5,201409_5
Sorulara gelince :D:
1-)Bu sistem birbiriyle uyumlu mu?
2-)Benim istediğim yavaş hızlansada yüksek hızlara(50-60kmh) çıkabilmesi, uzun mesafelere gidebilmesi (10km-tabiki fpv ile) ve ksek irtifalara çıkabilmesi. Yani akrobasiye ani manevre yeteneklerine falan sahip olmasına gerek yok. Onun için inşallah ileride başka bir tane multicopter düşünüyorum. 😀 Bu isteklerimi karşılar mı?
Bayağı uzun oldu kusura bakmayın, şimdiden teşekkürler iyi çalışmalar.
Abi çoğu parçayı yazıldıda bunları neye koyacazğız
Fatih’in şase çizim dosyaları yukarıda var, onu bastırıp parçaları içerisine yerleştirebilirsin.
GÜNCELLENDİ
Sizden ve başka kişilerden aldığım tavisyelere göre parçaları yeniledim. Bunda değiştirmem gereken bir şey var mı?
Parçalar:
Motor: Sunnysky Angel A2212 980Kv
ESC: SIMONK 30A BEC 5V3A 499Mhz yenileme oranı
Uçuş kontrol ünitesi: Naza M Lite
Batarya: 5000mAh 30C Max 40C 3S 11.1V
Prervane: 1045
Alıcı-verici: 6Ch 2.4GHz
Linkler:
Motor linki: http://www.aliexpress.com/item/SUNNYSKY-Angel-Series-A2212-13-980KV-2-3S-Airplane-Outrunner-Brushless-Motor-for-Multicopter-Quadcopter-Multi/32365227291.html?spm=2114.01020208.3.37.dcVnxn&ws_ab_test=201407_5,201444_5,201409_4
ESC linki:http://www.aliexpress.com/item/free….qbnyas&ws_ab_test=201407_1,201444_5,201409_2
Uçuş kontrol ünitesi: http://www.aliexpress.com/item/Orig…96.html?ws_ab_test=201407_2,201444_5,201409_4
Batarya: http://www.aliexpress.com/item/LION…80.html?ws_ab_test=201407_1,201444_5,201409_5
Pervane: http://www.aliexpress.com/item/Blade-1045-1045R-CW-CCW-Propeller-For-Multi-rotor-Copter-Quadcopter/32407742755.html?spm=2114.01020208.3.144.NEpX5l&ws_ab_test=201407_5,201444_5,201409_4
Alıcı-verici: http://www.aliexpress.com/item/100-…79.html?ws_ab_test=201407_1,201444_5,201409_5
Bu sistemle amacım, uzun mesafe (10km-fpv için), yüksek irtifa(1000m veya daha yüksek), yüksek hız(50-80kmh) ve tabiki uzun uçuş süresi (40-60 dakika). Ani hızlanma, Ani manevra yeteneği, ters dönme vb. istemiyorum. Eğer sistem uyumluysa, istediğim irtifa, hız, uçuş süresi vb. isteklerimi karşılar mı? Biraz uzun oldu kusura bakmayın. Şimdiden teşekkürler, iyi çalışmalar.
Bence sistem uyumlu. Uzun uçuş süresi için şaseyi hafif tutman gerkiyor, pil ağır çünkü.
Malzemeleri kim yazdıysa teşekürler calışmalarınızda başarılar
Abi step motorun esc olmadan hız kontrolü potansiyometre ile nasıl yapılır ?
Dutch roll aparatını anlattığımız posta bak, oradaki alet tam olarak istediğin işi yapıyor. 360 Derece Kamera Aparatı (Dutch Roll) Nasıl Yapılır?
Abi benim 2 tane step motor kullanmam gerekiyor. Bu alet işimi görür mü? Birde abi multicopter için lazım olduğu için hafif olması gerekiyor. Bu sence işimi görür mü yoksa daha hafifleri var mı? http://www.ebay.com/itm/Stepper-Motor-Drive-Controller-Board-Module-L298N-Dual-H-Bridge-DC-For-Arduino-/170926726867?hash=item27cc06ded3
2 step motoru kontrol eder. Hafif olmasını istiyorsan, sadece L298N entegre kullan karta girmeden bence. Multicopter için kullanacaksan verdiğim linkteki devreyi kullanma, daha basit bir şekilde işini çözebilirsin. Tam kullanım amacını ve multicopterin özelliklerini yaz bakalım.
Bozuk bir tane rc helikopter var. 3 tane step motorla çalışıyor. Arkadaki ileri gitmesine, ortadaki 2 motorsa yön ( dişli bir sistem ile yön ayarlanıyor) ve kalkış için kullanılıyor. Helikoptere pro mini arduino takarak step motorları ve nRF24L01 (haberleşme modülünü) çalıştıracaz. Arduino uno ile ise nRF24L01 ve kumanda görevi görecek butonları çalıştırarak kumanda oluşturacaz. Abi sorunumuz, helikopterdeki lithium polymer batarya çalışmıyor onun yerine başka pil nasıl takabiliriz helikopterdeki pro mini arduinoya ? Ve yön verecek olan ortadaki 2 step motorun hızını nasıl ayarlayabiliriz? Abi başka eksiğimiz varsa da yardımcı olursan seviniriz.
Yine li-po pil kullanmanız en sağlıklısı. Helikopterdeki kodunuzda step motor hızlarını ayarlamak için opsiyon olmalı. Yani Uno’dan göndereceğiniz potansiyometre değerlerine göre hızı değiştirecek olan değerler. BU Pro Mini’de nasıl bir kod ve kütüphane kullanacağınızla direkt alakalı görmeden bir şey söylemek doğru olmaz.
Abi pro mininin kodlaması bu alet ile (USB-Serial Dönüştürücü Kartı ) gerçekleştiriliyor. Bu alet pro minide bulunmayan ama uno’da bulunan FTDI çipi sayesinde haberleşmeyi sağlıyor. Sanırım bu alet sayesinde uno’da olduğu gibi yazılım yapılıyor sencede öyle mi? Diğer sorularıma da cevap bulabilidim teşekkürler abi.
Pro Mini’ye de yazılım yüklüyorsun, Arduino’nun minik bir versiyonu aslında. Kapasitesi düşük ama küçük olduğundan çok kullanışlı. Üzerinde USB portu yok, fakat FTDI Breakout Board ile bilgisayarından yine normal Arduino gibi kullanabilirsin. Veya bu board sende yoksa, Arduino Uno kullanarak da yapman mümkün.
Hocam arduino’ya sahibim Quadcopter yapmak istiyorum ama motorlar pahalı diye oyuncak arabadaki motorlar ile mini bir tane yapmaya karar verdim ama bu seferde pilde sıkıntı çıktı pil için önerecekleriniz nelerdir ? (Mümkümse biraz ucuz olsun 🙂 )
Yüksek rpm motora ihtiyacın var, oyuncak arabadaki motorlar işini görmeyebilir. En güzeli hurdacılardan bozuk helikopterler bulup onların parçalarını kullanmak. Pil olarak da yine bu helikopterlerden çıkacak li-po piller kullanılabilir.
Hocam quadcopter yapmak için 1 arduino , 1 arduino mini , kumanda , 2 nrf24l01 sensör ,4 ouncak araba motoru , 4 pervane, 4 tanede pil yeterlimi ? birde mini quadcopter yapacağım için 4 tane uygn pervane gösterseniz almam için sevinirim hocam 🙂
Yeterli değil 🙂 Pil 1 tane olabilir 4 taneye gerek yok. 4 tane ESC gerekiyor, hatta ve hatta belki bir de 6050 benzeri MPU. ESC yerine bu durumda motor sürücüsü kullanman gerekecek, ama istediğin performansı alman zor.
Öncelikle Merhaba;
Bir ArduCopter Projemiz var fakat parça uyumluluğu konusunda fikrinizi almak istedim.
Lipo : 4S 6000mAh 50C http://www.aliexpress.com/item/New-14-8V-6000mAh-50C-Max-55C-4S-4Cells-14-8Volt-RC-LiPo-Li-Poly-Battery/725706796.html
Esc : 30A
Prop : 10×45″
Motor: 1000kV http://www.aliexpress.com/item/4set-lot-A2212-1000KV-Brushless-Outrunner-Motor-30A-ESC-1045-Propeller-1-pair-Quad-Rotor-Set/32225197601.html
frame : http://www.aliexpress.com/item/FPV-Quadrocopter-X500-500-Quadcopter-Frame-500mm-for-GoPro-Multicopter-TBS-DJI-Spider/32365082503.html
Hesaplarıma göre 1.5 – 2 kilo copter ağırlığım olacak kağıt üzerinde yeterli görünüyor. Motorlar veya esc 4s batarya ile sıkıntı çıkarır mı ?
Birde Post’da arduino ile de yaptık kodları paylaşıcam demişsiniz örnek olması amacı ile görebilseydik iyi olurdu.
Bence sistemin yeterli. Propları farklı boylarda ve çokça almanı öneririm, farklı ihtiyaçlarına göre değiştirirsin. Arduino ile olan projenin detaylarını da girmeye çalışırım, ama daha giremediğimiz başka projeler de var bayram sonrası hızlandırırız 🙂 En kötü kodları paylaşırım tatil dönüşü postun altına fikir vermesi amacıyla.
Hesabınızı yaptım 690 KV çıktı bunun için oyuncak araba motoru yetmez mi ?
Üzerinde yük yokken verdiğin volt başına 690 rpm olması lazım. Yani 6v çalışıyorsa o oyuncak araba motoru, düşün artık 🙂 Oyuncak helikopter motorları istediğin rpm değerini verebilir, orada da torkuna bakman gerek.
ben yenı baslayanlardanım sorum cevaplarsanız sevınırım sız kontrol kartı olarak 2.0 yazmıssınız ben 2.1.5 buldum degısen bırsey olurmu bırde kartı aldıgımızda bızım ıcıne herhangı bır yazılım yuklememıze gerek varmı yoksa hazırmı gelicek şimdiden tesekkurler 🙂
,
2.1.5 olmasında sorun yok daha bile iyi olmuş 🙂 Yazılımı içinde gelecektir direkt kullanabilirsin.
Abi bir sorum olacak:Bende bir adet uzaktan kumandalı 4×4 çok harika oyuncak araba var.Devresinde sıkıntı vardı ucuz bir araba alıp devresini ona geçirdim çalıştırdım.Pil sorununu aşmak için 4.8v’den hariç 6v-4.7amp akü alıp role yardımı ile motorlara 6v ilettim buda çalıştı ancak ben role yerine motor kontrolü yapan ve kumandaya göre hızlanan ne kullanabilirim.Kullandığım kumandanında hız kontrolü yok sanırım kumandada değişecek beni bu konu ile biraz aydınlatırsanız çok sevinirim şimdikten teşekkürler.
Abi tüm ekibe selamlar ben bu soruyu you tube’de sormuştum cevap gelmedi burasını yeni gördüm rica etsem cevap alabilirmiyim. teşekkürler.
İsmail merhaba. Şu an anlattığın sistem çok net anlaşılmıyor. İstersen fotoğrafla, ya da basit bir çizimle anlatmaya çalış. Şu an anlattığın sistemde sanki kontrol kartını sadece motorları uzaktan kontrol etmek için enerji aç/kapat aracı olarak kullanıyormuşsun gibi anlaşılıyor, ve de bu durumda ya yanlış bir yol izliyorsun ya da kontrol kartı gerçekten bu fonksiyona sahip değil. Biraz konuyu açarsan daha net cevap veririm.
Abi bu yıl çocuk okula başladı birde evi taşıyorum cevaplar geç geliyor kusura bakma..
Resmi acele ile birşeylere benzetim ama nereye yüklüyecem bulamadım..
Aslında abi sorum şöyle sistem sadece alıcı ve vericiden ibaret..Ben alıcının motor çıkışlarına role bagladım roleler ile motorları 6v akü ile sürdüm..
Buradaki role amacım alıcının enerjisinden hariç(4.8v) daha güçlü enerji(6v-4.7amp) ile motorlara yüksek akım vermekti güzel bir sonüç aldım ama kumandaya dokundugum an akü motorlara direk enerji iletiyor(bir arabayı tam gaz ile kaldırmak gibi)..
bu role yerine ne kullanabilirim yada farklı uygun fiyatlı bir sistem önerebilirmisiniz..
İsmail merhaba. Röle kullanmak doğru bir tercih olmamış tabi, senin orada röle yerine bir transistör kullanman gerekiyor. Öncelikle kumandayla alıcı arasına bir bakalım. Multimetreyle çıkışı ölçtüğünde, kumanda kolunu oynatırken gördüğün değerleri yazar mısın?
Abi oyuncak araç yanımda degil köyde kaldı ama dediğin transitör olayını daha önce araştırmıştım bdx54-bdx53 bunları deneyecektim ama benim meslegim elektronik olmadıgı için yanlış baglayıp bdx53 leri yakmışım.. sonra bdx54 üzerinde biraz inceleme yaptım ve olayı çözdüm.. ancak o günden sonra fırsatını bulup deneyemedim.
Abi çıkışları ölçerek hangi transitör kullanacagımızamı karar verecegiz.. bdx54-bdx53’ler uygunmu
Evet. Ama çıkışları ölçmeden kesin bir şey söylemem doğru olmaz.
Abi, kız kaçıranı ateşleme devresini nasıl yaptın ?
Merhabalar,
Gelistirmekte oldugum quadcopter projem var fakat suan ardujno uno calisiyorum. Soyle bir proplemim var. Pin sayisi olarak yetersiz kaliyor. Burada ust modellerden birine gecmeyi dusunuyorum fakat kararsiz kaldim. Sizce arduino mega mi yoksa arduino due mi tercih etmeliyim. Fiyatlari hemen hemen ayni olmasina karsilik due islemci hizi daha ustun. Hangisini onerirsiniz.
Eğer yazılım uyumsuzluğu sorunu yaşamayacaksan ve 5v shield kullanmayacaksan Due’yi öneririm. Yazılımını Due’ye göre bir derle bak istersen. Pin çıkışlarında da akım sorunu olabilir, kullandığın diğer malzemeleri yazarsan daha net cevap verebilirim.
arduino için kodu verebilirmisiniz?
Onu daha sonra vereceğim, postu detaylandırırken. Kullanılan malzemeleri anlatmak, MPU için kütüphaneleri de eklemek ve PID ayarlarını da açıklamak gerekiyor. Arduino donelarda yükle çalıştır sistemi geçerli olmuyor maalesef.
abi merhaba motor projemiz için quadcopter yapmaya karar verdik..aynı zamanda remote control transmitterı da kendimiz yapacağız..controller nasıl yapılır adımları nelerdir,nereden başlamak gerek bize ne önerebilirsiniz..bunun üzerinede yeni sezonda çalışmalarınız olacak mı ?teşekkürler abi şimdiden
Selamlar. Aslında bunun pek çok yolu var. PICAXE de kullanabilirsiniz, Arduino da, basit bir mikroçip veya transistörler kullanarak bile başarabilirsiniz. Şuradaki şemaları bir inceleyin, frekansı belirleyin, sonra üstüne konuşalım -> http://www.qsl.net/va3iul/Homebrew_RF_Circuit_Design_Ideas/Homebrew_RF_Circuit_Design_Ideas.htm
Merhabalar Vacuum Forming yöntemi ile yaptığınız frame de kullandığınız termoplastik malzemenin tam olarak hangi termoplastik malzeme olduğunu ve nereden temin edebileceğimizi söyleyebilir misiniz acaba?
Merhabalar Mehmet;
Biz Polistiren kullandık. Malzeme tedariki biraz zor ve ancak yüksek adetlerde bulunabiliyor. O yüzden işin biraz zor. İnternetten araştırıp tek tek bütün firmalarla irtibata geç.
Ama Abs, pet, pet-g de işini görecektir. Pet malzeme ile çalışırken dikkatli ol ısıtırken rengi opaka dönüşürse sertleşiyor.
benim sorum fatih abiye, acaba 3d step çizimini parça bazında da yükleyecek mi? ya da göndermek mümkün mü çünkü ben bu parçaları okudla bastırmak istiyorum ancak assemblyden kabul etmiyorlar
Onur merhaba. parçaları solid works ün deneme sürümünü veya başka bir 3d programın deneme sürümünü yükleyerek kendin ayırabilirsin.
Fatih
murat bey merhaba nasılsınız.biz motor projemiz için bilgisayardan kontrollü uzaktan kumandalı araba yapmak istiyoruz.aynı zamanda arabaya yerleştirdiğimiz kamerayla görüntüyü bilgisayara aktarcagız.hangi tür kamera kullanmalıyız ve o kameranın aldığı görüntüyü bilgisayara nasıl aktaracagız ve arabanın kontrolünü bilgisayardan nasıl yapacagız hangi programı kullanmalıyız hazır yazılımları var mı proje için link atmanız mümkün mü acaba? yardımlarınız için şimdiden teşekkürler sevgiyle kalın…
Eda merhaba. Bizim güvenlik robotu tam da istediğin işi yapıyor aslında. O bölümü seyret, ilgili postu oku, sonra aklındakileri sor istersen.
Merhabalar elimde 7.4 volt 1500mah plim var analart olark kk2.15 seçtim özellikleri arasında Input Voltage: 4.8-6.0V geçiyor 4 tane 1000kv motorum var 7.4 Voltu anakarta baglasam yakarmıyım ?
Anakarta direkt bağlantı yapmamalısın. Eğer yapacaksan da 4.8-6v arası olmalı. Regülatör kullanarak yapabilirsin, ama yine de sağlıklı olmaz. Board ani güç çekişlerinde arada kendisini resetler ya da regülatör bozulursa sorunlar yaşarsın vs. Sen pil baglantılarını yukarıdaki resimde de gördüğün şekilde yapacaksın.
Kumanda kontrolünden çıktıktan sonra otomatik olarak başlangıç pozisyonuna dönme özelliği için hangi parçaları kullanmalıyız. Seçtiğiniz kontrol kartı bu özelliği destekliyor mu.?
Gps modülü gerekiyor onun için ve bizim kart desteklemiyor. Uygun fiyatlı ve o özelliği destekleyen en iyi kartlardan biri 3d Robotics APM 2.5, onu tavsiye ederim. Hem de açık kaynak kodlu olduğundan geliştirilebilir. http://copter.ardupilot.com/
Merhaba. Bu kiti almak istiyorum. Karar verdim gibi. http://bit.ly/1MEatMJ
Ancak bu kit ile beraber hangi pili almalıyım değerleri ne olmalı. Ağırlığı ne olmalı.? Bu konuda yardımcı olursanız sevinirim. Gopro tarzı bi kamera ile uçurmayı düşünüyorum. 20 dakika civarı uçuş süresi ideal olur sanırım. Fiyat-Performans olarak en iyi ne önerirsiniz. Önerileriniz için şimdiden teşekkür ederim.
Hocam tahmini maliyet ne kadar tutar acaba
Serkan merhaba, parça listesini verdik, istediğin modele göre hesaplayabilirsin. Çok farklı seçenekler ve fiyatlar var senin hesaplaman en doğrusu.
Murat abi, elimde http://www.robotistan.com/super-multikopter-seti-kendin-yap-drone-kiti-multicopter bu kitten var. Ancak ben bu copteri arduino dan kontrol etmek istiyorum. Arduino ile quadcopterdeki alıcıya nasıl bağlanıp komut gönderebilirim?
Arduino’ya bir wireless verici ve quad’a da uyumlu alıcısını takıp yapabilirsin. Arduino bağlantısı zor değil, hatta direkt o işi yapan shield kartlar var. Yazılımla programlayarak da sonrasında istediğin komutlar gönderilebilir.
Abi, müsaitsen biraz daha açıklayabilir misin ?
Aslında sorunu biraz daha açarsan daha çok yardımcı olabilirim. Projenin detaylarını ve amacını anlatır mısın biraz?
Abi, başta yazdığım gibi bir quadcopter kitim, 9 kanallı fly sky (http://www.robotistan.com/fly-sky-9ch-24-ghz-ekranli-9-kanal-kumanda-seti) kumandam ve onun alıcısı var. Ancak ben quadcopteri flysky kumanda yerine arduino kullanarak potansiyometre veya buton devresi ile çalıştırmak istiyorum. Arduino’ya bir verici takıp quadcopterdeki alıcıya nasıl bağlanıp komut yollayabilirim?
O zaman dediğim gibi bir RF alıcı ve verici alıp Arduino’ya ve drone kontrol kartına takacaksın. Uygun protokolde haberleşen cihazlar olmalı. Arduino üzerinden potansiyometre ile okuduğun datayı da bu RF üzerinden göndereceksin. Yine seçtiğin modüle ve sisteme göre uygun kütüphaneleri kullanman gerekecek.
Bu iş için en çok kullanılan modüllerden biri şu.
Abi kusura bakma ama son bir sorum daha olacak. Arduino ve nrf24 ile komut gönderirken KK2’deki esc-pinlerini kontrol eden normal bir yazılım yazarsam olur mu? Yoksa quadcopter de KK2 kontrol kartı olduğu için farklı bir yazılım ya da farklı bir yöntem mi kullanmam gerekiyor?
Sen zaten datayı kk2ye değer olarak yolladığında, o gereken komutları escye veriyor olacak. Eğer standart dışı bazı komutlar işleteceksen, o zaman kk2den vazgeç. Açık kaynak kodlu ve daha rahat programlayacağın bir kart seç, apm veya pixhawk gibi.
Murat abi selamlar,
Bu drone için anten takip sistemini nasıl yapabiliriz
Selam Sercan, anten takip sistemi için KK2 yerine APM ya da PixHawk gibi bir kontrol kartı kullanman gerekir. Arducopter bu işte bence çok iyi. 3D Robotics hem açık kaynak kodlu olmasıyla hem de makerların tam desteğiyle bu işte lider durumda şu anda bana sorarsan.
Ve de kullanımı çok kolay. Yapman gereken DroidPlanner 2.0‘ı indirmek, Arducopter‘in son sürümünü kullanmak. Sonra da DroidPlanner’da ‘Follow Me’ modunu aç.
Çok teşekkür ederim abi iyi çalışmalar
selam abi.Drone da k2.0 kullanmışsınız. ben arm işlemciyle yapıcam ve doğal olarak kendim programlıcam ama bazı sıkıntılar var. program algoritmasını verebilirmisin abi ona göre kodlarımı düzenlicem. bu arada yaptığınız işle bizleri aydınlatıyorsunuz.bunun için çok teşekkür ederim.
Selam Cihan. Program algoritması zor değil aslında, motor kontrolleri belli. Temelde kumandadan gelen sinyali alıp motor hareketine çevireceksin, 4 motorlu bir yer aracından çok da farklı değil. Zor olan kısım PID algoritması. Acc ve gyro sensörlerden gelen raw datayı anlamlı hale getirmek ve uygun hesaplamalarla motor hareketlerinde düzeltmeler/değişiklikler yapmak. Hazır yazılımlarda bile PID ayarları üzerinde çok vakit harcaman gerekebiliyor. Biraz o konuya ağırlık verip çalış, bilgilen, sonra sorunu bir daha sor, üzerinde konuşalım.
Abi ben 3D baskı ile drone’umun iskeletini yazdıracağım. Fakat baskı yapan yerler fiyatı çok uçuk söylüyor acaba ucuza baskı yaptırabileceğim bir yer var mı?
dronenun kamera görüntüsünü bilgisayara aktarmak istiyorum sizce hangi programı kullanmalıyım ?
Biz GoPro ve kendi yazılımını kullandık. Sen de kullanacağın kameraya göre karar vermelisin.
Teşekkürler Murat abi peki kamera görüntüsü kolaylıkla bilgisayara aktarabileceğim bir drone önere bilirmisiniz yada standart wifi ile çalışan dronelar için ne tür bir yazılım gereklidir
Drone’larda iki tip kayıt oluyor. Biri kart üzerine kayıt yapıyor, sonra alınıp pcye aktarılıyor. Diğerinde ise wifi üzerinden ip kamera gibi yapıyor. Yani ip girip browserla veya örneğin vlc player ile bağlanıp izleyebiliyorsun. Telefonunu bile kullanabilirsin. Bunların gelişmiş olanlarını kendi yazılımları/telefon uygulamaları ile beraber geliyor, çeşitli ayarlar yapma ve izleme olanakları sunuyor. Bunun dışında da, çok daha uzun mesafelerde çalışan tekil alıcı verici sistemleri var. Bu sistemlere kablosuz kameranı bağlayarak yüksek frekansta yayın/kayıt yapabilirsin. Bunlar direkt birbiri ile haberleşir, ve görüntü aktarımı yapabilir.
Teşekkürler Murat abi peki Parrot AR.Drone 2.0 Elite Edition yada Cheerson CX-30W almayı düşünüyorum anlık olarak görüntüyü bilgisayara aktarmak için hangi programı önerirsiniz
Bahsettiğin droneların kendi telefon aplikasyonları ve yazılımları var, görüntü aktarmakta problem yaşamazsın. (CX_WiFiUFO)
Merhaba Murat abi ben CX-32 aldım kendi kumandasını kullanmadan sadece bilgisayarım üzerinden kontrol etmek istiyorum bilgisayara hangi programı kurmalıyım.Kamera görüntüsü bilgisayarıma aktarmak için hangi program uygun olur
Hazır sistemleri başka sistemlerle eşleştirmek için; osiloskopla kumanda frekanslarını okumalı, transfer edilen data bitlerini pc ile çözümlemeli ve bilgisayarındaki yazılımla, göndereceğin komutları bu veriye göre oluşturmalısın. Çok kolay bir iş sayılmaz, o yüzden cihazın kendi yazılım ve donanımını kullanman işleri çok kolaylaştırır.
İşin en kolay çözümü, kumanda potansiyometrelerini bir Arduino’ya eşlemek ve pc ile Arduinoya komutlar göndererek kumada değerlerini değiştirmek. Yani yine kendi sistemini kullanacaksın cihazın, ama kumandaya komutları sen değil Arduino verecek.
Merhaba Murat Abi benim yeniden bir sorum daha var ben arduino ile kumanda potansiyometrelerini eşletirmekte sıkıntı yaşadım tam olarak nasıl halledebilirim.İkincisi ben CX-32 drone kullanıyorum bu dronenun üzerine ek ilave arduino kullanıcakmıyım yoksa bilgsayara bağladığım arduino ile bunu halledebilirmiyim
İlave Arduino’ya gerek yok, sen Arduino’yu sadece potansiyometrelerin yaptığı işi simüle etmek için kullanacaksın. Yapman gereken, potansiyometrelerin kumanda girişlerini iptal etmek, ve o girişlere Arduino üzerinden kendi sinyallerini göndermek.
Arduino’nun kendi sitesinde dijital potansiyometrenin nasıl yapılacağını bulabilirsin.
Teşekkürler Murat Abi sağol senin zamanını alıyorum ama kumanda girişlerini tam olarak nasıl iptal edicem ilgin için teşekkürler
Kumanda joysticklerinin karta bağlandığı yerlerin lehimini söküp oraya Arduino girişlerini yapacaksın.
Teşekkürler Murat Abi kolay gelsin
3S Lipo pil
30A Brushless ESC (x4)
KK2.1 Quad-copter Kontrol Kartı
980 kv Brusless motor (x4)
1245 (x2) 1245r (x2) 12 inç pervane
Turnigy 9X-V2-2.4 GHz-9 Kanal Kumanda
Sensörler :
MMA7341L 3 Eksen İvme Ölçer IMU
BMP180 Barometrik Basınç / İrtifa Sensörü
Su Geçirmez DS18B20 Dijital Isı Sensörü
RPM Sensörü
Telemetri Sistemi
Sistem uygun, şase ağırlığını 2kg altında tuttuğun sürece uçar 🙂
hocam HDD motor kullanmak istiyorum quardcopter için sizce uygun mudur bide nasıl bir ESC kullanabilirim 7200 RPM motor gücü ?
Çalışır mı çalışır, ama çok zorlanacağın kesin 🙂 Mekanik olarak yük kaldırmak için yapılmadığından (ve sabit hız için tasarlandığından) o eksendeki kuvvetlerde motorda çok çabuk aşınmalar ve bozulmalar olacaktır. Ayrıca kanatları takarken de problem yaşayacaksın tabi ki, ama çözümü var. Bence Brushless ESC kullanarak denenebilir, şaseyi hafif tutarsan çalışacaktır. Fakat dediğim gibi çabuk bozulacağı şimdiden öngörülebiliyor 🙂
Hocam HDD motor yerine hangi motor u onerirsiniz guclu bir motora ihtiyacim var
Yazıda okuduğun üzere, yüksek verimli ve istediğin özelliklere uygun bir motor alman gerekiyor. Yazıdaki yönergelere göre önce sistemin ağırlığını belirle, istediğin özellikleri belirle (uzun uçuş süresi önemli/önemsiz, hız önemli/önemsiz, stabilite vs ataklık ve diğer özellikler), sonrasında ona göre motor seçilecek. Ama en önemli özellik motorun verim değeri, minimum %90 olmalı.
Merhabalar kolay gelsin bi kac sorum olacaktı. Bitirme projemiz için quadcopter yaptık. F450 üzerine klasik 980kv motorlarla donanımı kk2.15 yazılımı 1.9 stevis olan mıcrocontroller kullandık. İnternet üzerinde cok fazla PI degerleri falan var fakat hala stabıl ucuramadık ve tabı frame nin bır kolunu da kırdık. Yardımcı olabılır mısınız
PID ayarları sisteminize çok bağlı. Ağırlık merkezi, mekanik yapısı, hareket mekanizmaları. Uygun ayarları deneyerek bulmalısınız. Benim sayfada verdiğim ana ayarları yaptıktan sonra drone stabilitesine, yönlenmelerine göre ayarları değiştirerek yapacaksınız. Yardımcı olabilmem için çok detaylı bilgi vermen gerekiyor. Hatta uçuş/kalkış videosu paylaşman da gerekli ki görebileyim davranışını.
S.a nanocopter yapmak istiyorum 4x çekirdeksiz 3v-5v 12mm motorlar(örnetk:jtron) için kontrol kartı lazım ve bu kart ile kontrolu nasıl saglarım yardımcı olursanız sevinirim
Öyle geniş bir soru sormuşsun ki üzerine paragraf paragraf yazı yazmak lazım 🙂 Nanocopter’i Arduino Nano kullanarak yapabilirsin, uygun Esc’lere ve IMU’ya ihtiyacın olacak. Motorların modeline bağlı olarak ihtiyacın olan esc’leri seçebilirsin. Aeropilot kullanırsan yazılım derdin de kalmaz. IMU olarak Razor hatta 6050 bile kullanabilirsin. Sorunu detaylı ve spesifik sorarsan yardımcı olabilirim.
Murat abi ben quadcopter yapmayı kafaya koydum,koydumda fakat yardımın lazım sımdı asagıda yazan motor olsun esc ler olsun kontrol bordu olsun hepsı bırbırını desteklermı bılgı verırsen yardım edersen cok sevınırım
Eklemeyı unuttum abı ozru dılerm bunlar malzeme lıstesı govde felan onlar okey.
KK2 ANAKART(CONTROL BOARD)
4X2300 KV FIRCASIZ MOTOR
4 TANE 30A SİMONK ESC
10 TANE 4,5 İNÇ PERVANE
KUMANDA VE ALICI TURNİGY VE 6 KANAL
BATARYA 2200 mAh
Net cevap verebilmem için batarya özelliklerini(c değeri) ve sistemin toplam ağırlığını da yazman gerekir.
slm drone almayı ama havada kalma suresının uzun olmasını ıstıyorum bunun ıcın dronun uzerıne 10watlık gunes enerjı panelı koysam havada kalma suresını uzatabılırmıyım sızce
Merhaba Mehmet. Güneş panelleri ancak destek işlevi görebilir, uçuş süresinde gözle görülür bir artış sağlaman çok zor. Drone, üzerine güneş paneli yerleştirilebilecek bir yapıya pek sahip olmadığı gibi, motorlara sağlanması gereken enerji fotovoltaik hücrelerle toplayabileceğinden çok daha yüksek. O yüzden, Mars’a gönderdiğimiz keşif robotlarındaki sistem gibi, bir yere park edip panellerini açarak pilini şarj etmesi, sonra uçmaya devam etmesi daha doğru bir metot gibi görünüyor, en azından şimdilik!
9 kanal şart değil, gimbal yapacaksan gerekebilir sadece, o da kamerayı drone yönünden bağımsız olarak istediğin yöne döndürmek istersen geçerli. Uçuş süresi için buradaki en kilit faktör motorlar. Datasheetini inceleyerek verimine bakmalı ve ne kadar güç tükettiğini hesaplamalısın. Ama görünen o ki kullanımına göre 5-10 dk arası bir uçuş süren olur.
Kumanda üzerinde görüntüyü anlık olarak alma yok galiba. Anlık olarak görüntü almak için telefon kullanımı yapılabılırmi ? bunun için ne gereklidir. Verdiğiniz cevaplar için teşekkürler..
Yapılabilir. Biz GoPro bağlayarak görüntüyü telefondan alıyorduk aslında. Ancak tamamen bağımsız sistemler için fpv sistemine geçebilirsin. Diğer yorumlarda benzer cevaplar vermiştim, onlara bir bak.
Ortalama 30 dakika havada kalma süresi olan bir drone tarzı hava araçı yapmak istiyorum açıkcası. Anladıgım kadarıyla 1000 Mah civarı bir pilimiz olucak yeterli olması için. Motorlarımı küçültmeliyim uçuş süresini arttırmak için ( Düşük KV lı motorlar mı tercih etmeliyim.)
1000 Mah 30 dakika için yeterli olmayacaktır. Motorları yüksek verimli ve az enerji harcayan motorlardan seçmelisin, düşük kv olması sistemi idare edebildiği sürece senin için avantaj. Nasıl hesaplanacağını yukarıda anlattım. Şase mümkün olduğunca hafif olmalı. Pervaneler de ona göre seçilmeli (uzun olmalı, fakat yeterince uzun, fazlası değil). Pilin yüksek Mah olacak, yine sistem ağırlığı ve motorlarla dengeli şekilde. Ve de uçururken de enerjiyi ona göre harcamalısın, araba kullanmak gibi düşün.
2 sorum olcak
1 si kamera için anlık izleme yapılıyormu ?
2 si google cardboardın yapımı mevcutmu ?
Merhaba. Anlık izleme yapabilirsin tabi, ama buna yönelik bir kurulum yapman gerekli. Biz GoPro kullanarak telefona anlık görüntü alabiliyorduk. Bunu Cardboard ile entegre edebilirsin, programda da söylediğimiz gibi. Diğer yorumlarda da benzer sorulara detaylı cevaplar verdim, onlara da bir göz at.
Google kendi sayfasında bütün detaylarını ve yapım aşamalarını anlatıyor, biz tekrar anlatmaya gerek duymadık. Oradan bakabilirsin.
Murat abi merhaba nasılsın. Bitirme tezini quadrator aldım. Sizin anlatiminizi takip ettim bilgileri edindim. Bir kaç sorum olacak.
ardinou kullanacağım. Elektronik bilgim yok ancak bitirme tezini aldığım hoca bu derse girmemi istedi bende bu dersi alıyorum.
1- motorlarin 2 sinin saat yönünün tersine dönme gereksinimi anlamadım. Torku ortadan kaldırmaktan kasıt ne oluyor.
2. Esc hız kontrolunumu sağlıyor yoksa pil ile motorlar arasına bagladigimiz bir farklı bir aparatmi.
Yeni araştırmaya başladım sorularim biraz saçma olabilir. Kafam o kadar karıştıki.
Bu arada govde kısmını kompozit malzeme veya ABS malzeme turunden yapmak istiyorum. 3d printerinda bu malzemeleri kullanan bir yeri bulma sansim olabilirmi.
Selam Murat. Motorların hepsi aynı yöne dönseydi, oluşacak dönme momenti sebebiyle(atalet momentinden) sistemi istediğimiz şekilde dengeye getirebilmek için helikopterlerdeki sisteme benzer şekilde (kuyruktaki ekstra kanat) bir mekanizma kullanmak zorunda kalırdık.
Esc(electronic speed controller) motorlara sağlanan enerjiyi anakarttan gelen komutlara göre değiştirerek pervanelerin dönüş hızını ayarlar. Her bir motor için bir tane vardır ve her motorun dönüş hızı bu şekilde ayarlanarak drone’u istediğimiz şekilde hareketlendirebiliyoruz.
3d printer kullanarak abs baskı alabilirsin elbette, daha detaylı bilgi için onunla ilgili bölümü de seyret ve yazımızı incele.
Merhabalar benim elektrikle hiç işim olmadı ama meraklıyım bu tür şeylere bi drone yapmak istiyorum güneş enerji destekli tutma kollu kameralı . böyle birşey yapmak için gerekli malzemeler nelerdir tam olarak yazarsanız çok mutlu olurum teşekkürler.
Yukarıdaki malzemeleri kullanarak standart bir drone yapabilirsin. Kamera desteği için de diğer yorumlarda verdiğim cevapları okursan detaylı bilgiler var.
Güneş enerjisi için de pek çok yorumda cevap verdim, kısa uçuş sürelerine sahip yüksek enerji harcayan bu sistemleri havada güneş enerjisi ile düzgün olarak desteklemek çok mümkün değil, daha doğrusu verimli değil. Sebebi de aerodinamik sistemleri ve yapılarının bu işe çok uygun olmaması. Drone yapıları geniş kanatlı uçaklara göre çok daha farklı.
Murat abi merhaba,
outrunner brussless motor fiyatları internette çok yüksek, bugün kadıköyde pasajları gezdim satıcılar ellerindeki motorun kaç kv değerinde olduğunu dahi bilmiyorlar çok düşüktür diye güvenip alamadım.
20 tl fiyat verdiler. 20-30 civarında bulma şansım varmı 1400-1500 kv degeri işimi fazlasıyla görür.
sultanbeyli bit pazarı demiştiniz daha önce ordada yine motorun kv degerlerini bilmiyorlarsa ne yapmam gerekir.
Diğer parçalar içinde açıklama yaparsan çok sevinirim, iyi çalışmalar abi.
Kv değeri motorun yapısıyla ilgilidir, eğer motor datasheetine erişimin yoksa, bulabilmen biraz zor. Modelini internette aratıp bakacaksın. Kv bulmanın bir yolu, motorunu, devrini bildiğin bir başka mekanizmaya çevirip (Diğer bir motor, matkap, vs) motorun çıkışlarından voltaj değeri ölçmektir. Sonra uyguladığın devri ölçtüğün voltajla böleceksin. Çıkan değer KV değerin olacak (uygulanan birim Volt başına RPM) Bu sebeple isimsiz motorlar hakkında deneme -yanılma dışında fazla şansın yok maalesef.
Ancak şunu da söyleyelim, biz de 20 tl’ye motor aldık, kullandık ve inanılmaz verim aldık.
Diğer parçalar için de spesifik sorman lazım, gereken ana bilgilerin tamamını yukarıda anlatmıştım.
Murat abi merhaba,
Drone hızını arttırmak için neler yapabiliriz. Ardinou veya kk2 hızı etkilermi etkilerse hangisi daha iyi olur acaba ilgin için tesekkurler abi
Merhaba. Drone hızını etkileyen pek çok faktör var. Ağırlığı, aerodinamik yapısı, esc, pervane, motor, pil, kart, esc üzerinde ve kart üzerinde bulunan firmware’ler. Yani hemen hemen her şey 🙂
Genel olarak iyi bir motor, bu motora yeterli enerji sağlanması ve pervane uzunluğu en çok etkileyen faktörlerdir. Ama en önemlisi ağırlık elbette. Ağır bir sistem her zaman yavaş gidecektir ( ve de gitmeli 🙂 )
KK2 Kartını kullanmak istiyorum. Bu kartta kod yazma ihtiyacı bulunmuyor galiba direk bağlantıları yapıp kumandaya tanıttığımız zaman uçuşa hazır hale geliyor?
Evet, fakat yazıda verdiğim ayarları yapman gerekiyor, yoksa düzgün uçurman mümkün değil.
yazıda verdiğiniz ayarlar pek anlaşılmıyor. Daha açıklayıcı bir şekilde ne zaman atacaksınız.
Yazı güncellendi, ayarlara bakabilirsin.