


Selamlar!
Bu hafta basit ama bir o kadar da etkileyici bir projemiz var. Basit tabiriyle, çizim robotu. Sizlerden gelen yoğun istek üzerine, evde daha kolay yapılabilecek ve eğlenceli bir proje seçtik.
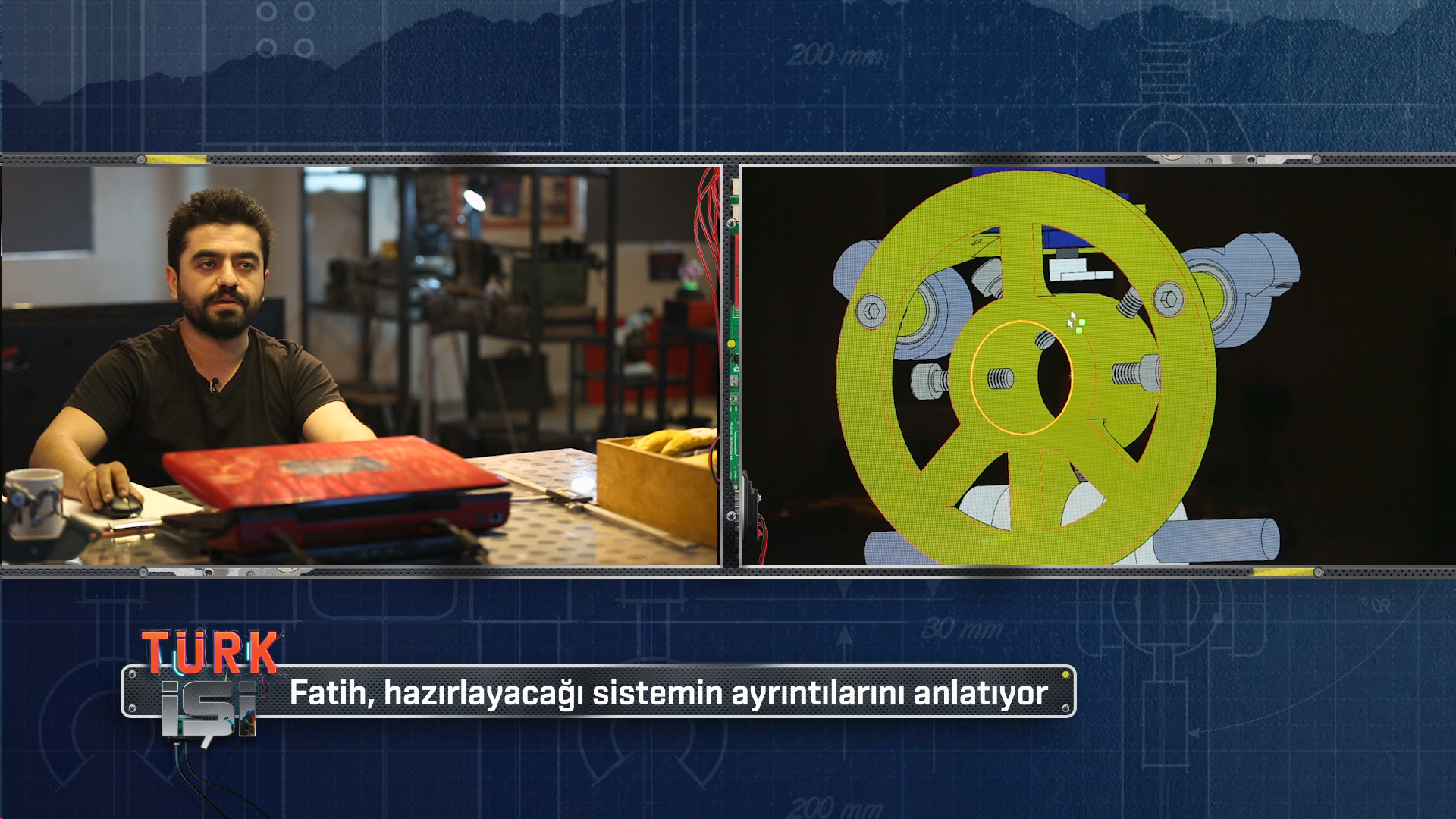
Proje Sandy Noble’ın mükemmel bir projesidir, internette Hektor, Kritzler, Drawbot gibi pek çok örneği ve Polargraph’ın varyasyonları ve ataları da var; ancak ben Sandy’nin yaptığı işi çok beğeniyorum açıkçası.
Biz biraz daha profesyonel gittik, 2 alçıpan levhayı birleştirip büyükçe bir duvar haline getirdik. Demirler kaynatarak bunu bir tekerlekli bir panel üzerine oturttuk, Fatih de çizen mekanizmayı(gondola) daha gelişmiş bir şekilde tasarladı. Motorları da büyüttük. Ama sonuçta bu sistemi çok basitçe cd ve iple bile yapabilirsiniz, yakın performanslar almanız mümkün.


Hemen başlayalım 🙂
Malzeme Listesi
Önemli Not: 5+6 veya sadece 7’yi kullanacaksınız, ikisine birden ihtiyacınız yok 🙂 Eğer 5. maddedeki L293D yerine A4988 veya DRV8825 benzeri kullanacaksanız, 6. maddedeki shift register’a da gerek kalmıyor.
- Arduino – Herhangi biri olur
- Düğümlü ip veya kayış veya buna benzer motorun çevirebileceği bir şey 🙂 Stor perde ipleri bile olur.
- 2 adet step motor (Biz nema23 kullandık, çünkü gidilen mesafeler uzundu, mesafe uzadıkça moment artıyor ve motorun torkunun da ona uygun olması gerekiyor.) ve kayışınıza uygun kasnak
- 1 adet servo motor, küçük hobby servoları yeterli. Biz SG90 Tower Pro kullandık. Bunu kalemi çizmesini istemediğimiz yerlerde havaya kaldırmak için kullanıyoruz.
- 2 adet step motor sürücüsü – Biz L293D kullandık, üst üste 2 tane lehimledik. Normalde 0.6 amper kaldırıyor, ikisini üst üste lehimleyerek bunu 1.2’ye çıkarabilirsiniz. İsterseniz 3 tane bile olur. Eğer çizim yapacağınız panel 1x1m gibi bir alansa daha küçük motorlar ve 2 adet L293D yeterli olur.
- 1 Adet Shift Register – 74HCT595N Bununla Arduino üzerinde 2 step için 8 pin kullanmak yerine 4 pin kullanıyor olacağız.
- 1 adet AF Motor Shield 5 ve 6 daki malzemeleri kullanmak ve de devresini oluşturmak istemiyorsanız ve projenin diğer taraflarına odaklanmak istiyorsanız kullanın, tavsiye ederim, işinizi çok kolaylaştıracaktır. Bunu aldığınız takdirde 5. ve 6. maddelere ihtiyacınız kalmıyor.
- Sürücüleri soğutmak için fan
- 12V güç kaynağı – Biz ayarlı güç kaynağımızı kullandık, 7.2 Volt vererek hem servo hem stepperları besledik.
- Gondola için kalem ve cd. İsterseniz aşağıda çizimlerini vereceğimiz gondola tasarımlarından istediğinizi 3D printer baskısı alıp kullanabilirsiniz. Kalem için asetatlı kalemler uygun, akrilik su bazlı kalemler de olur. Basit boardmarkerlar her yüzeyde güzel çalışıyor.
- Denge ağırlıkları, basit olta kurşunları yeterli. Kalem+gondola sistemini aşağı bastırmak için 100 gr kullanıyosanız, kayışların iki tarafına da (100+kalem ağırlığı+gondola ağırlığı)/2 gr ağırlık takacaksınız.
TASARIM KISMI

Merhaba.
Dataları Kalem Gondola, Spray Gondola, ve platform+gondola olarak 3 dosya halinde yükledim. Kalem Gondola kısmındaki gondolayı kullanıp, motorlarınızı istediğiniz yere bağlayıp, sistemi çalıştırabilirsiniz. Ben yine de sistemi 2,4mx2m lik platformlu haliyle de yükledim.
İnternetten farklı tasarımları da yükleyip üretebilirsiniz. http://www.thingiverse.com/search?q=gondola&sa=
Görüşmek dileğiyle
Fatih YILDIZ
ELEKTRONİK KISIM
Bu proje için bir motor shield kullanmanızı tavsiye ederim, birçok problemden kurtulur ve de motor bağlantıları, sürücüleri, ekstra shift register ve kodla fazla uğraşmadan işi çözebilirsiniz. AF motor Shield bu iş için ideal. 2 step motorumuz ve 1 servomuzu rahatlıkla sürecek ve ekstra konfigürasyon veya pin değiştirmeye gerek kalmadığı gibi derli toplu bir sisteminiz olacaktır.

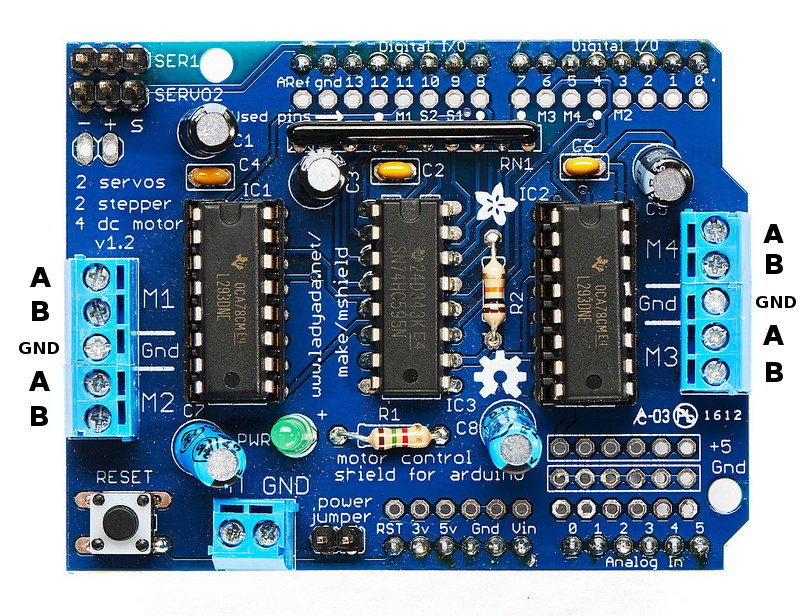
Eğer bulamıyorum derseniz, aşağıdaki şemayı kullanarak kendiniz de yapabilirsiniz.

————————————————————————————————————————————-
Diğer türlü yaparsanız da çok bir şey yok. Arduino’yla 2 adet step motor ve 1 servo kontrol edeceğiz sonuçta, önceki projelerimizden bakabilirsiniz. Sürücüleri bağlayın, step motorları kontrol edin, servo bağlantısı da çok kolay. Servo sinyal kablosunu pin 9’a takıyoruz. Stepler için de 1. motor için STEP pini 4 ve DIR pini 5; 2. motor için STEP pini 7 ve DIR pini 8 olacak. ENABLE pinleri de sırasıyla 3 ve 6.


Yukarıdaki resimde motor 1 ve motor 2 dc motorlar. Step kontrol etmek istediğimiz için motor 1: Step motorun 1. bobini (coil 1) ve motor 2: Step motorun 2. bobini(coil 2) olacak. Aşağıdaki gibi:



L293D entegresi kullanacaklar 74HCT595 shift register da ekleyerek STEP ve DIR pinleri kullanabilirler. Eğer bunu yapmazsanız bu sefer kod üzerinde bazı değişiklikler yapılması gerekiyor. Step ve DIR pinlerini kullanmak yerine 4’lü pulse’lar göndereceksiniz.
Servo için resimde görüldüğü gibi Arduino’dan enerji girişi yapılabilir, ama bana sorarsanız dışarıdan ayrı bir batarya ile besleyin. Servo kablosunda motora mümkün olduğunca yakın noktaya + ve – arasına paralel olarak (yani artı artıya, eksi eksiye) 104 seramik kapasitör ve 1000mf elektrolitik kapasitör bağlamanız da tavsiye olunur. Hatta sinyal kablosu ile Arduino arasına da 1kohm direnç bağlamanızın bir zararı olmaz 🙂 Ama unutmayın, burası önemli, bataryayı servoya dışarıdan bağladığınızda mutlaka siyah kablo (gnd)’den Arduino gnd’ye hat çekmeniz gerek. Yani servonun çalışması için Arduino gnd, servo (-) ve batarya (-) ortak olacak.


Motorları panelin 2 köşesine bağlayın, servoyu da gondolaya. Cd kullanıyorsanız, yaklaşık şöyle bir tasarımınız olacak.


Motor bağlantıları da şu şekilde:

Gondolaya ve kayış uçlarına denge ağırlıklarını da bağladıktan sonra çizime hazırız. Evet bu kadar basit.


YAZILIM KISMI:
Yazılım kısmı için de ihtiyacınız olan 2 parça var, biri Arduino, biri de Pc için olan yazılım.
PC tarafındaki yazılımı kendiniz derleyip çalıştırmak isterseniz, şiddetle tavsiye ettiğim Processing‘i indirip bilgisayarınıza kurduktan sonra kaynak dosyayı açın ve derleyin.–>> Polargraph.1.2
Arduino üzerine atacağınız yazılım, indirdiğiniz zip dosyasının içerisinde. Aradığınız klasör şu: Polargraph 1.2\arduino-source\ Bu klasör içinde libraries klasörü var, bunu Arduino kütüphanelerinize (Arduino klasörünüz\libraries) kopyalayın. \Polargraph 1.2\arduino-source\polargraph_server_a1 klasöründen de polargraph_server_a1.ino dosyasını açıp Arduino’ya gönderin.
Pc tarafında yazılımı çalıştırırken problemlerle karşılaşabilirsiniz. Açılmayabilir ya da hata verebilir. Böyle bir durumda direkt Processing ile verdiğim kodu derleyerek açmanız gerekiyor. Bunun için önce Processing 1.5.1 versiyonunu indirin. Processing’i çalıştırın, file->preferences->sketchbook location dan sketchbook klasörünüzü bulun. Daha sonra indirmiş olduğunuz Polargraph.1.2 zip dosyasını açın, içindeki processing-source/Processing libraries/ klasörü altındaki bütün klasörleri sketchbook klasörünüzün altındaki libraries klasörüne kopyalayın. Yine aynı şekilde zip dosyası içindeki processing-source/polargraphcontroller klasörünü kopyalayın, sketchbook klasörünüz içine yapıştırın.
Şimdi Processing’i tekrar başlatın, file->sketchbook->polargraphcontroller projesini açın. Baştaki küçük play ikonuna tıklayın, programın sorunsuz olarak derlenip açılması gerekiyor.
Yazılımı çalıştırdıktan sonra, ayar yapmanız gerek. Setup kısmına girin, makinenizin boyutlarını ve home pozisyonunu ayarlayın. Home pozisyonunuz 2 motorun millerinin tam orta noktasından bir 15 cm kadar aşağıda olsun. Serial porttan Arduino’nun bağlı olduğu portu seçin. Üstteki kırmızı yazı yeşile dönecek.
Motor step ayarlarınızı da girmeniz gerekiyor. Şöyle örnek vereyim. Biz gt2 kayış kullandık, yani hatvesi 2 mm. Kasnak 20 dişliydi, dolayısıyla 20*2=40 mm/rev bizim ayarımız olacak. Motor hızlarını da istediğiniz gibi ayarlayabilirsiniz.
Sağ üstteki “paused” yazısına tıklayın. “Click to pause” olacak. Şu anda makineniz çizime hazır. Pen lift ve pen drop diyerek servo konumlarını test edin.
Input tabına gelin. Şimdi set home diyin, ve fiziksel olarak da gondolanızı home pozisyonuna alın.
************************DETAYLI AYARLAR
Üstteki ayarlar kısmı için biraz ek bilgi veriyorum, tam anlaşılmamış olabilir:
Motorları doğru bağladıysanız ve yazılımları da yazıda anlattığım gibi kurduysanız, sıra ayarlara geldi demektir. Polargraph arayüzünü açtıktan sonra ilk iş, Setup sekmesine gelmek. Oradan Serial Port‘a tıklayarak Arduino Com Port‘unu gireceksiniz. Sonra sağ üstteki yazılara bir kere tıklayacaksınız ki, pause modundan çıkarak Arduino’ya komutlar gitmeye başlasın.
İkinci en önemli iş; makine boyut ayarlarını, motor ayarlarını ve kalem/servo ayarlarını yapmak. Öncelikle Machine Width kısmına iki motorun milleri arası mesafeyi girin. Machine Height kısmına da panelin boyunu. Panele asacağınız kağıdın enini boyunu da mm cinsinden Page Width ve Page Height olarak girin. İki milin tam orta noktasının yaklaşık 15 cm altına bir noktacık koyun, burası asacağınız kağıdın üst orta noktası olacak. Center Homepoint ve Center Page dedikten sonra, Polargraph arayüzünde de bu değeri 150 olarak Home Pos Y ve Page Pos Y olarak girin. Sıra motor ayarlarında. Kullandığınız kasnak ve kayışa göre ve motor tipinize göre değerler girilecek. Örnek: Kayış gt2 ise, hatvesi 2 mm’dir ve kasnak 16 diş ise, 32 mm çevresi demektir. Yani bir dönmede 32 mm ilerleyecek kayış. Bu değeri Mm Per Rev değeri olarak girin. Steps Per Rev değerini de yine sürücü ve motor cinsinize göre girin, örneğin 7.5 derecelik bir step motorda, microstep kullanmıyorsanız 360/7.5 yani 200 step. Bu değerin 2 katı yani 400 gireceksiniz, dual motor sebebiyle.
Son olarak da servo ayarları var. Pen Up Position ve Pen Down Position değerlerini olmasını istediğiniz derecelere ayarladıktan sonra, Upload Lift Range diyeceksiniz ve sonrasında Test Lift Range ile kontrol edeceksiniz.
Ayarları kaydettikten sonra Upload Machine Spec diyerek Input sekmesine gelin. Pen Lift ve Pen Drop ile servonun hareketinden doğru olduğundan emin olun.
Gondolayı el ile kayışlardan ayarlayarak biraz önce panelde koyduğunuz noktacığın olduğu yere kalemi denk getirecek şekilde ayarlayın. Sonra Input sekmesinden Set Home komutunu tıklayın. Dayanın, işimiz neredeyse bitti 🙂
Move Pen To Point komutunu tıklayın ve sayfa üzerinde istediğiniz bir yere tıklayın. Gondolanın oraya doğru gitmesi gerekli. Eğer ters yönlere gidiyorsa, motor kablolarınızı çıkararak değiştirin ve doğru yönleri ayarlayın. Doğru çiziyorsa iş tamamdır, artık çizime hazırız!
Select Area diyerek çizim alanını belirleyin, sonra da Set Frame To Area‘yı tıklayın. Artık çizim yüklemeye hazırız.
************************
Resim çizebilirsiniz, ama şahsen ben vektör çizimlerini çok daha başarılı buluyorum. Select Area diyerek çizim alanınızı belirleyin, ardından Set frame to area diyerek set edin.
Load vector diyerek, svg uzantılı bir vektör çizim seçin. Internette milyonlarca var. Eğer elinizde olan bir vektörü kullanmak isterseniz, .svg formatına çevirmek için Inkscape isimli mükemmel ücretsiz programı kullanabilirsiniz.
Vektör boyutunu ve yerini “Resize vector” diyerek ayarlayın ve çizim alanınız içerisinde istediğiniz şekilde konumlandırın.
Draw vector dediğinizde çiziminiz başlayacak. Bizim robotu 1.5 saatte çizdi, ancak ben tekrar deneme şansımız olmadığından güvene almak için motor hızlarını bayağı düşürmüştüm. Siz hızlandırabilirsiniz.
Bölümde göstermediğimiz spreyle boyama aparatını da denedik, çok da güzel oldu 🙂
Hepsi bu kadar! Evde yapılabilecek proje göstermediniz demezsiniz artık diye düşünüyoruz, ara ara böyle kolay ve güzel şeyler de yapacağız sizler için 🙂

Türk İşi ekibi sosyal medya hesapları:
Facebook: facebook.com/ntv.turkisi Twitter: @ntv_turkisi Instagram: ntv_turkisi Youtube kanalı: TÜRK İŞİ
Kişisel hesaplarımız:
Murat Kızılkaya Twitter: @muratkizilk, Instagram: muratkizilk
Metin Şahin Twitter: @MetinSahin_m, Instagram: METINSAHIN_M
Fatih Yıldız Twitter: @FatihTvittir, Instagram: fatihyildiz1981
Özkan Özarslan Twitter: @ozkankim, Instagram: ozarslanozkan
 RT
RT
Yanıtla
156 Yorumlar on "Çizim Robotu Nasıl Yapılır?"
Programlarınız da yazılım konusunda daha detaylı olarak yer verirseniz, Murat bey bir nevi nasıl çalışır hangi kod parçacığı ne iş yapar tarzında anlatırsa izlerken kahvemizin yanına bir de kurabiye almışçasına güzel olur 🙂 Program için teşekkürler 🙂
Tamam, önerinizi dikkate alacağım 🙂 Çok fazla derine inmek çok zor tabi 30 dkda ama aralara sıkıştırırım çaktırmadan 🙂
Yazılım kısmındaki ilk paragrafı biraz detaylandırır mısınız Murat bey?Arduino tarafında ve özellikle processing tarafında hangi kodu derleyeceğiz.Processingde hangi kodu çalıştırdıysam hep aynı hatayı verdi.”The method selecetOutput………..” şeklinde başlayan bir satır.
Tamam, ilk fırsatta detaylandıracağım. Şimdilik verdiğimiz dosyanın içindeki hazır derlenmiş exe dosyalarını kullanabilirsiniz.
Merhaba,
polargraphcontroller.exe dosyasını çalıştırdığım zaman,
C:\ProgramData\…………………………..\javaw.exe
Belirtilmemiş hata
mesajı alıyorum.Sorun nerede acaba?
Bahadır selamlar. Yazılım kısmını güncelledim. Oraya yazdığım adımları izlersen sorunsuz olarak çalışacaktır.
Merhaba murat abi sizin programinizi severek izliyorum ben de teknolojiye ilgiliyim ozellikle yazilima ben 8.sinifa gectim fen lisesi hedefim ve zaten ya yazilim muhendisi ya da doktor olmak istiyorum ama daha bu yasimda(14) bu kadar derin elektronige inemiyorum sizin yaptiginiz gibi ve bir bolumunuzde havaya yazan 3d kalemi gostermistiniz onu detayli anlatir misiniz ve bu arada benim pek yazilim bilgim yok sadece microsoft small basic biliyorum:( yani arduinoyu cok bilmiyorum biraz basite indirerek anlatirsaniz sevinirim bu arada 3d yaziciyi babamla birlikte yapmak istiyorum ama projeye bakmak bile gozumu korkuttu ayrica 3d kalem icin ingilizce kaynak da onerebilirisniz
Eren selam. Sondan başa doğru geleyim. 3d kalem için kaynak yok, çünkü bizim mamülümüz 🙂 Yani silikon tabancasından yapılma böyle bir alet biz görmedik en azından. Nasıl yapıldığı da yok. O yüzden biraz beklersen nasıl yapılacağını detaylıca anlatacağız, zamansızlıktan gösteremiyoruz sadece. Kalemde yazılım yok zaten gözünü korkutmasın. 3d yazıcı dersen, o da seni korkutmasın, bize yaz, elimizden geldiğince yardım ederiz. Yani sen, baban ve Türk İşi ekibi bir araya geldiğinde yapamayacağımız şey yok! Bize sosyal medya hesaplarımızdan ulaş 🙂
İyi günler bastan sona yaptıgınız hersey için çok saolun yazıcı yapmadan önce gozumde cok buyutmustum sızın sayenızde bende yaptım sımdıde bunu yapmak istiyorum fakat duvara değilde motorları sabıt olmasını ıstıyorum sadece kağıdını değiştiricem fıkrınızı almak ısterım 🙂
Olur tabi sistem aynı 🙂 Dikkat ederseniz biz de önce kağıt üzerinde denedik!
Merhaba abilerim.Çok selamlar hepinize.Öncelikle böyle bi programı bize izlettirdiğiniz için çok teşekkürler.Sorun şu ki ne program içinde nede bu sayfada daha detaylı bilgilendirme yapmanızı bekliyoruz.program içinde olmasa bile burada bekliyoruz.Daha sonra ben elektronik haberleşme önlisans okuyorum.Bu aralar elektrikli bisiklet konusuna çok fazla takmış durumdayım.Biraz araştırdım türkiyede bu işi yapan 1 firma var ürünleri ataş pahası.Yurt dışından getiren bir firma var türkiyedeki firmaya nazaran daha ucuz ama o bile öğrenciler için çok acıklı bi fiyat :)Yani dileğim şu ki programınıza böyle bir ürünü konu alsanız ve bize yardım etseniz çok seviniriz.teşekkürler tekrar programı yaptığınız için.
Kadir merhaba. Şimdilik olan vaktimizin tamamını çekimlere ve projeleri yetiştirmeye harcıyoruz. Gün içinde kendi işlerimizde çalıştığımızdan, bu işi ancak geceleri proje yetiştirme ve hafta sonları çekim şeklinde yapabiliyoruz. Bu postları bile yazabiliyor olmamız mucize. Daha detaylı ve ayrıntılı bilgi istediğinizin farkındayız, fakat bunun için de zaman gerekiyor. Çekimlerden sonra bütün postların üzerinden geçerek, anlaşılmama şansı olan yerleri detaylandırmayı düşünüyoruz.
Elektrikli bisiklet projemiz var, fakat bu sezona yetişmeyecek gibi duruyor. Önümüzdeki sezonda mutlaka yapmayı düşünüyoruz, ama Türk İşi stilinde 🙂 Sürprizler bekleyin!
Çok teşekkürler sıkı takipçiniz olduğumuzun farkındasınızdır umarım.Malesef ülke durumu bu bi tek yol gösterici bulduğumuzda sarılıyoruz bırakmak istemiyoruz murat abi.İzleyici olarak sizi sıkıştırabiliriz.Buda sizin şansınız mı artık bilemiyorum:)Ancak teşekkür ederiz her şey için.Okulda öğrenemediklerimizi öğrendik şimdiye kadar.Memnuniyetle gelecek sezonu bekleyebilirim.Yeter ki siz yapın öğretin.Emin olun arkanızdayız.Siz bize yol gösterdiğiniz sürece izinizdeyiz.Son olarak ekipteki diğer abilerime selamlar özellikle Özkan abiye.İyi çalışmalar.
Çok teşekkürler Kadir, elimizden geleni yapmaya çalışıyoruz sizler için 🙂 Siz öğrenmek isteyin yeter bizler buradayız.
Selamlar. 3d dosyalar step formatında yüklenmiştir. Fatih
Abi süpersin teşekkur ederim hemen basıp tarayıcıyı yapmaya baslicam onca isinin gucunun arasında ilgilendin ya ne desem az tekrardan tesekkur ederim
ne demek nuh rica ederim. zamanında yapmamız gerekiyor ama yoğunluktan yetişemedim 🙂
Nevzat Bey, postları zamanla geliştireceğiz, dediğiniz gibi adım adım anlatmaya çalışırım merak etmeyin. Biraz zaman alacak ama bilginiz olsun. Bir taraftan çekimler, bir taraftan kendi çalıştığımız işlerimiz, bir taraftan proje yetiştirme dertlerimiz olduğundan siteye bu kadar vakit ayırabiliyoruz şu anda. Zamanla parça parça geliştireceğiz. Birçok arkadaşımızın da sizin gibi sorular sorduğunu hesaba katarsanız, gerçekten çok detaya girmek için vakit yaratmakta zorlanıyoruz şu anda.
Murat bey; ilginize cok teşekkürler. Zaman problemini anlıyorum. Haklısınız. Ancak genede söylemek istiyorum. Lütfen bir fırsatını buldugunuzda verdiğim banggood sitesi adresine bir bakar ne yapmak istediğimi görürseniz belki basitce bu yaşlı ama meraklı abinize bir yol önerirsiniz.
SAYGI ve SEVGİLERİMLE
Merhaba Murat bey “Processing’i çalıştırın, file->preferences->sketchbook location dan sketchbook klasörünüzü bulun” cümlededki “sketchbook” klasörünü bulmadım nedir bu kalsör nerde allah aşkına.
Merhaba. Bu klasör yazdığınız kodları sketch olarak içine kayıt ettiğiniz klasördür. Varsayılan olarak dokümanlar altında Processing klasörünün içinde. Programı açınca sol üstte ‘file’ yazısına tıklayın, o listeden de ‘preferences’a tıklarsanız açılan pencerede klasörün nerede olduğunu göreceksiniz.
Murat bey Dr diklerinizi harfiyen adim adim uygulayacagim. Takildigim yerde sizden ya dim isterim umarim yardimci olursunuz. Bu isi basarirsam tum detaylariyla bu bilgiyu paylasacagim. Allah razi olsun tsk.
Tamam, başarılar dilerim. Kolay gelsin!
Murat bey bir yerde sıkıntı yaşıyorum araştırdım ama bulamadım nedeni. Inkspace içine Laser Engraver eklentisını aldım lakin bu eklentiyi kullandığımda https://www.youtube.com/watch?v=kr4dQAeRpLw videodaki gibi yapamıyorum hata veriyor. 2 türlü hata alıyorum linkleri bunlar hata mesajı 1 :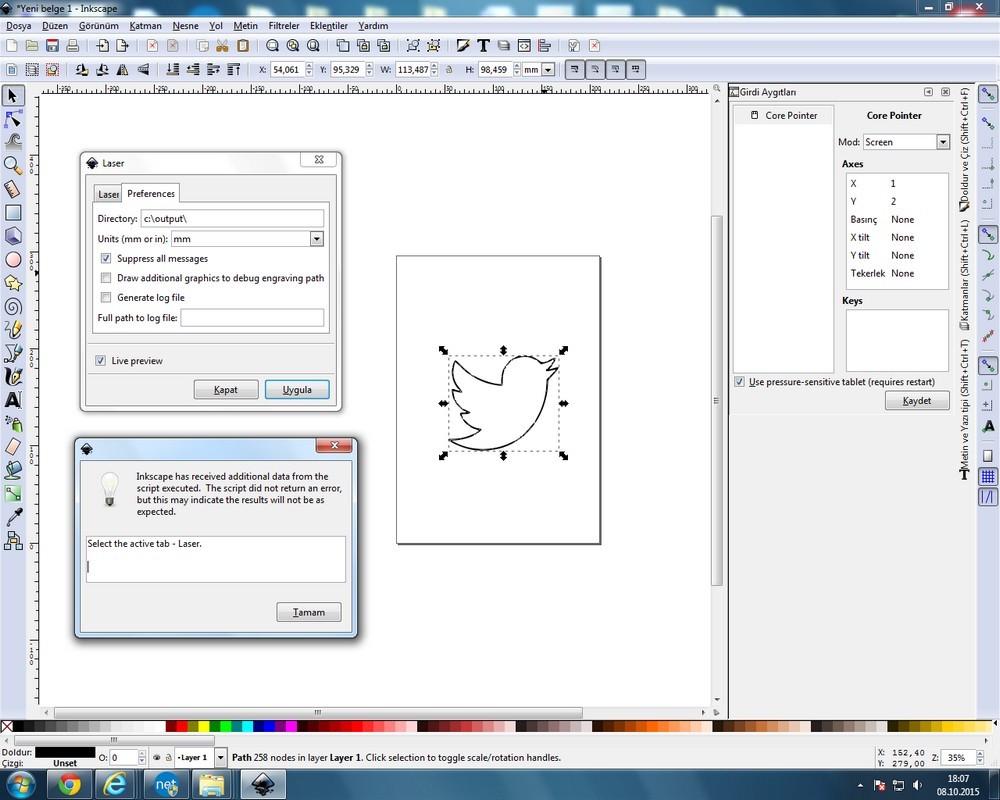 ve hata mesajı 2:
ve hata mesajı 2: yardımlarınızı bekliyorum.
yardımlarınızı bekliyorum.
Resim açılmadı, ama ya eklenti ve program versiyonları uyumsuzdur, ya da kullandığın grafik. İkinci şıkkı bir eleyelim önce. Inkscape programını açtıktan sonra sen elle basit bir çizgi çizip, çizgiyi seçtikten sonra eklentiyi çalıştır bakalım. Hala hata verirse sana uyumlu program+uzantıyı zipleyip dosya olarak koyarım.
Evet, versiyon uyumsuzluğundan kaynaklanıyor gibi gözüküyor. Dosyaları koyduğun yer doğru. Bendeki Inkscape versiyonu -> Inkscape 0.48.5 r10040
Bu versiyonu indirirsen çalışacaktır. Eklentinin linkini zaten vermiştim. Eğer hala çalışmazsa, o zaman eklenti dosyasında satır 3080 ve 3156 üzerinde değişiklik yapacağız. “inkex.unittouu” yerine “self.unittouu” yazmak lazım.
Murat bey merhabalar,
Ben Mekatronik 3. sınıf öğrencisiyim. son sene bitirme projeme ilk adım olarak bu projeyi yapmak istiyorum.
Arduino ile ilgili bilgiye sahibim ve bu yazın sizin bu programınıza denk geldikten sonra bu konuda kendimi geliştirip 2 tane orta seviyeli robot yaptım ve sıranın sizin projenize geldiğini inanıyorum.
Projemde “5 Bar Parallel Robot” ile çizim yapmak istiyorum açıkcası.(mekanik kısımda asistan hocam yardım edecektir.)
Benim asıl yaşadığım sorun şudur; PC ortamında çizilen şeklin ( kare,üçgen vb.) analizini yapabilmek yani koordinat bilgilerini alabilmek ve bunu Arduino ya iletmektir. bunun için kullanılacak program hakkında fikrim bulunmamaktadır.
Bu konu hakkında yardımcı olursanız çok sevinirim. Teşekkürler.
Kaan merhaba. Yapmak istediğin şey şunun gelişmiş bir versiyonu sanırım. Bu sisteme Pc üzerinden komut veya çizim göndermek istiyorsan, bir arayüz programına ihtiyacın var. Aynı zamanda da bu arayüz programının gönderdiği koordinatları okuyup işleyecek Arduino üzerinde bir yazılıma. Bu yazılımları kendin hazırlamak durumundasın. Eğer yeterli donanımın yoksa, açık kaynak kodlu yazılımları araştırmalısın. Benim yazdığım sistemler arasında benzerleri var, fakat tam olarak istediğin işi yapmaz; bizdeki paralel bar robot, içinde hazır olan fonksiyonları çalıştırıyor mesela. Dışarıdan koordinat alanlar ise paralel bar değil.
Abi illa step motormu olması gerek dc olmazmı ve dc ile step arasında ne fark var açıklayabilirmisin lütfen pek bi kaynak bulAmadım bu konuda teşekkürler
DC de olur, ama sen step motor kullan. Dc motorun bir encoderi olması lazım çünkü, ne kadar ve ne yöne hareket ettiğini biliyor olman lazım. Koordinat vererek başka türlü istediğin noktaya götüremezsin kalemi. Step motor da bir dc motordur aslında, iç yapıları ve kontrol mekanizmaları daha farklıdır.
Abi bende bir adet cd rw motoru bitanede eski disket motoru var bunlar step motormudur ve bu proje için kullanabilirmiyim farklılık sorun oluştururmu
Kullanabilirsin sorun olmaz. Bu projede değil tabi. Torkları çok düşüktür, her projede kullanman mümkün değil. Easydriver ile sürebilirsin.
Pekala yazıcı içinden çıkan stepler iş görürmü ve bir yazocıdan kaç step çıkar teşekkürler iyi geceler.
Çoğu yazıcıdan 3 tane çıkar, 1 tanesi işine yarar. Nokta vuruşlu yazıcılardan bahsediyorum tabi. Eski olanlardan daha çok çıkabiliyor. Nema 17ler işini görecektir.
Bu ekip on numara 🙂 sağolsunlar her zaman yardımcı olmaya çalışıyorlar özellikle Murat hocamı şu aralar çok bunaltıyorum ama her zaman yardımcı oluyor kendime bir iş takvimi yapıp boş zamanlarımda burdan projeler ile ilgili şeyleri yapmayı planlıyorum böylelikle kendimi geliştiririm diye düşünüyorum
Merhabalar Türk işi.Step motorları ve servo motoru sürücü devresine nasıl baglıyacagız.Tam detaylı acıklanmamıs .Yardımcı olursanız cok mutlu olurum.
Orhun merhaba. Verdiğim resimlerden de anlaşıldığı gibi, servoyu direkt Arduino’ya bağlayacaksın. Step motorların sürücü bağlantısını da daha önce anlatmıştım (ve yukarıdaki resimlerde de L293D entegresinin Arduino ve motor bağlantılarının nasıl olduğu gözüküyor). Sürücü modelini söylersen biraz daha ayrıntılı anlatayım.
Sürücü modeli l293d. Arduinoyoya nasıl baglandıgı ve birde steplerin nasıl baglandıgı tam anlayamamıstım Murat bey.
Yazıyı güncelledim, açıklamalar ve resimler ekledim. Bir bak bakalım anlaşılmayan bir yer kaldıysa çekinmeden sorabilirsin. Sizlere yardım etmek için buradayız 🙂
Sagolun hocam.peki 2tane step motorun baglanıs sekli nasıl olucak ?.Sadece bir tanesini göstermissiniz Murat bey .
2 motor için 2 entegre kullanacaksın ve aynı şekilde bağlayacaksın. Arduino üstünde başka pinleri de kullanabilirsin, bu durumda yazılım içerisinde pinleri tanımlamak gerekiyor.
Sagolun Murat bey. step motoru Aynı şekilde bagladıgımda arduino ya o zaman 2 side aynı yönde hareket etmezmi?
Farklı pinlere bağlantı yapılacak. Kod içerisinden de o pinleri kontrol etmen gerekiyor.
Postu da tekrar güncelledim. L293D devresi yerine hazır bir shield kullanırsan işler çok daha kolaylaşır, bunları dert etmeye pek gerek kalmaz 🙂 Yazıda ne kullanılması gerektiğini verdim.
Cok sagolun Murat bey.Söylediğiniz AF motor shield kullandıgımızda tek kartla 2 step motoru kontrol edebiliyoruz galiba.Birde arduino yinede 2sini tanımlamalımıyız.
AF motor shield’i Arduino üzerine takıyorsunuz. Bu kartın girişlerine hem 2 step motoru hem de servoyu bağlıyorsunuz o kadar. Karta enerji verdiğinizde ve Arduino’ya anlattığım şekilde yazılımı yüklemeniz yeterli.
Cok sagolun Murat bey. Peki arduino nun üzerine taktıgımız shield sürücünün port ayarlarını yani servo motor ve step motorun baglı oldugu pini yine ayarlamamız gerekiyormu.yoksa dierek motorları takıp kullanabilirmiyiz?
Direkt takıp kullanabilirsin, o yüzden o kartı önerdim. Hiçbir ayar yapmana gerek yok 🙂
Murat bey 2 tane step motoru nasıl baglıyacagız. bir önceki örnekte sadece bir tane baglamayı gösteriyor. ardunio ile nasıl ilişkilendireceğiz?
Murat abi bende çizim robotu yapmak istiyorum. Fakat bu robot duvara değil de masa üzerinde kagida çizim yapacak. Sanırım bunun için step motor kullanmama gerek yok, iki tane düşük voltajli DC motor ve servo motor yeterli olur. Projenin elektronik ve mekanik aksaminin ustesinden gelebilirim. Fakat yazılım kısmı cidden can sıkıcı, bu yaptığınız projenin yazilimiyla da oldukça farkı var. Acaba yazılım konusunda onerebileceginiz birşeyler ve sunabileceginiz kaynaklar var mi ? Şimdiden teşekkür ederim 🙂
Dc kullanacaksan bir çeşit encoder da kullanman lazım. Ya da sadece servo, fakat bu sefer de çözünürlük düşük olur. Yine en iyi çözüm stepper kullanmak burada. Biz öyle bir proje yapmadık ama şu linkte Drawbot diye bir sistem var, başlangıç anlamında sana biraz yol gösterebilir.
Maliyeti düşürebilmek adına DC motor kullanmayı düşünmüştüm. Ama dediğin gibi step motor kullanmak daha mantıklı abi. L293d lerin bacaklarını üst üste lehimledigini söyledin murat abi peki step motorların girislerini pinlere birlikte mi baglicaz o zaman?
Merhaba murat abi,
Bende çalışma gerilimi 7 volt , akım 0.7 a olan iki çıkma step motor var. bu step motorları bu motor shield ile nasıl kullanırım veya kullanabilirmiyim?
Kullanabilirsin sorun olmaz.
Merhabalar. Devrenin mekanik kısmını tamamladık. processing programınnı kullanımını anlayamadım motorları yönlendiremiyorum . Yardımcı olursanız sevinirim
Merhaba. Yukarıda postu düzenleyerek bilgileri ekledim, oradan ayarların nasıl yapıldığına bakabilirsin.
İyi günler öncelikle çalışmalarınız için çok teşekkür ederim.Yaşadığım sıkıntı yazılımı ardiuno ya atmak oldu.ino dosyasını ardiunoya atmaya çalıştığım zaman multiplier tanımını yapamıyor (scope hatası) nasıl bir yol izlemem gerekli şimdiden teşekkürler .
Kütüphaneleri yüklediğine emin ol, genellikle o yüzden bu hatayı verir. Hatayı tam olarak yazarsan yardımcı olabilirim.
Merhaba Hasan. Kütüphaneleri kurmamışsın. Processing klasörü altına 3 kütüphaneyi de kopyalaman gerekiyor. Sketch klasörünün altında libraries klasörüne kopyalasan da olur.
murat abi 3 kütüphane olarak bunlarmı
controlP5
diewald_CV_kit
geomerative
Evet, bunları söylediğim yerlere kopyala, sonra derle.
nasıl deryeceğimi kısa bir şekilde anlatırmısın murat abi
Processing’i aç. Oradan file->preferences altında sketchbook klasörünün adresini bul.
Oraya git ve polargraphcontroller klasörünü buraya kopyala. Aynı klasöre libraries diye bir klasör daha aç, kütüphaneleri bunun içine kopyala.
Yani sketchbook klasörün şuysa örneğin
‘c:/users/hasan/processing’
klasörler şöyle görünecek
‘c:/users/hasan/processing/libraries/controlP5’
ve
‘c:/users/hasan/processing/polargraphcontroller’
gibi.
Sonra Processing’i baştan başlat. File->sketchbook->polargraphcontroller tıkla, dosya açılınca da küçük play ikonuna tıkla.
peki murat abi bu arduinon gelen hataları engelleyecekmi
Hayır 🙂 Bu işin Processing tarafıydı. Arduino tarafında yapman gereken daha basit, Arduino IDE 1.0.5 versiyonunu kullan. Sorun çözülecektir.
çok saol murat abi
merhaba Murat abi yukarıda yazan kayış kasnak değerlerini processingin neresine yazacağız anlatırmısın
Processing’e değil Arduino’ya yazman gerekli. Ama Processing ile derlediğin programda setup kısmına yazarak upload machine specs demen daha kolay bir yöntem olur.
Murat abi ozaman arduinoya bir kod yazmamıza gerek yok
Kurman gerekenlerin hepsini anlattım yukarıda, orayı iyice bir oku. Arduino’ya atman gereken yazılım var tabi.
merhabalar. step motor için çizdiğiz devrede illede arduino megamı kullanıcağız yoksa uno kullansak
olurmu
Uno da olur, Mega şart değil.
Sizin kullandığınız step motorların torku Nm yada söyle sorayım 1,5 x 1,5 metrelik bir alanın step motorunun torku kaç Nm olmalıdır
Merhaba İbrahim. Aslında hesap basit moment hesabı. Maksimum mesafeleri ve kasnak üzerindeki net kuvvetleri hesaplarsan ihtiyacın olan tork çıkacak. Sistem normalde dengede olduğundan (ağırlıklar sayesinde) ortalarda küçük bir alan taramak için standart nema 17ler fazlasıyla iş görüyor. Fakat açılar büyüdüğünde, mesafeler uzadığında ve denge ağırlıkları arttığında probleme dönüşüyor. Biz her alanı problemsiz tarayabilmek için 1.9Nm Nema 23ler kullanmak durumunda kaldık.
Peki bu nema 23lerin ortalama fiyatları nedir
Çok değişken, internetten bakabilirsin.
Çok soru soruyrum ama bu linkteki step motorun torku uygunmu
Murat abi 150 x 150 cm bir alana koyacağımız step motorların torku kaç Nm olmalı
http://urun.gittigidiyor.com/ev-elektronigi/nema17-step-motor-207258636
Nema 17 bu ve bahsettiğin ölçüler için sorun yaşama ihtimalin var. Ayrıca çok pahalı 🙂 Biraz daha fiyat araştırması yap.
Genelde internet sitelerinde torkun birimini Ncm olarak veriyor bu birim Nm ile aynimi acaba
Biri Newton.Metre biri Newton.Cm. Yani arada 100 kat fark var 🙂
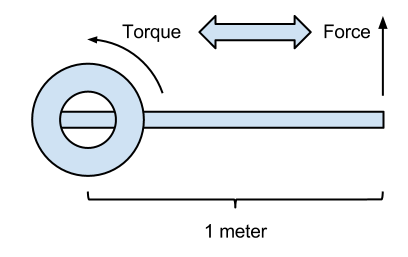
Tork birimi olarak kullanılır. Basit fizik birimi aslında, kuvvet (N) x Mesafe (cm veya M).
Aşağıdaki resme bakarsan daha net anlarsın.
murat abi senin anlatmalarına göre bu motor çok çok uygun ozaman
http://urun.gittigidiyor.com/diger-her-sey/cnc-step-motor-3amper-tork-2-2nm-209048095
Bunun da çektiği akım yüksek 🙂
murat abi bana önerebileceğin sağlam bir site varmı diğer bunun gibi sitelerde ya çektiği akım fazla yada torku az
Aslında akımın fazla olması sürücü kaldırdığı sürece sorun olmaz. 1.5-2 ampere kadar sorun yaşamazsın bizim sistemle. Google’dan ararsan bulursun belirli sitelerde arayarak zaman kaybetme, Google hepsinin ortak veritabanı gibi çalışıyor zaten.
http://www.direnc.net/NEMA23-STEP-MOTOR-23HS54410,PR-21264.html
1A ok, riske atmamak için biraz torku arttırırsan olacak.
Şu haliyle de çalışır bu arada, ama köşelerde (motora en uzak mesafelerde) problem yaşanabiliyor. Bu problemi sıfırlamak için kuvvetli motor tavsiye ediyorum. Yoksa, bu motor işinizi görür, ama aldıktan sonra yetersiz kalmasındansa başta kuvvetli olması her zaman iyidir. Motor bu zarar etmez, her yerde kullanırsınız 🙂
Murat Abi Peki Bu Motora Göre Stor İpi Alsam Ne Kadar Almam Gerekir Bir Türlü Hesaplayamadım.
Stor ipi son tercihin olsun, gt2 kayış ve kasnak bulmaya çalış. Stor ipi alacaksan da, motoruna ona uygun bir kasnak bulman, yapman (stor perde makarasından) veya print parça kullanman gerekecek. İhtiyacın olan uzunluk da tamamen panel büyüklüğüne bağlı. Gondolanın her yeri dolaşabilmesi gerekiyor. (Panel kenarı+panel hipotenüsü + ek pay) x 2 gibi olmalı.
Motor Bağlantısını Yaptım arduino motor shielde güç girişi yapıyorum ama kart ısınıyor programdan referans noktası seçince motorda titreme oluyor hareket yok servoda da hareket yok.
Giriş voltajıyla oyna, gereğinden fazla veya az sağlıyor olabilirsin. Servoyu da doğru pinlere bağladığına emin ol, AF Shield’larda 2 giriş var. Bağlantıları kontrol et. Ve yazılım ayarlarını yukarıda anlattığım şekilde doğru yaptığından da emin ol.
selamlar murat abi öncelikle projeleriniz çok güzel ama bende ibrahim arkadaşımız gibı sorun yaşıyorum istetim tipten bir step motor bulamıyorum bi yardımcı olurasan çok sevinirim 🙂
Murat abi peki bu boyutları 1×1 m yapsak 40 Ncm uygunmu yukarıda verdiğiniz ağırlık formülünün sonucuda 150 gr
Uygun olan değerleri yazdım sana bir önceki yorumda, riske atmamak için biraz daha kuvvetli motor seçebilirsin.
Birde söylemeyi unuttum urun özelliklerinden holding torque ve detent torque var bunlardan holding torque ye bakıyoruz değilmi.
Holding torque senin bakman gereken değer. Detent torque, enerji verilmediğindeki torku gösterir, senin onunla işin yok burada.
Murat Abi Okulda Proje Olarak Aldım Bu Yaptığın Ürünü Ama Aklımı Karıştıran Sorular Var 1-Vektör Olarak Çizdiğimiz Resmi Nasıl Çizdirecez.
2-Stor Perde İpi Kollanacam Bunun Mesafesini Nasıl Ayarlamam Gerekiyor Motora Göre.
3-Yazılım Kısmında İse Ufak Defek Sıkıntı Oluyor Aklım İyice Karşıyor. Yardımcı Olursan Sevinirim.
1. Yukarıda aşama aşama anlattım. Ayarlar tamamsa, en kolayı vektör çizdirmek, programa yükleyecek ve göndereceksin. Sadece .svg formatında olması gerekiyor.
2. Onun da hesaplamasını yukarıda, ve diğer yorumlara verdiğim cevaplarda detaylıca anlattım. Stor perde ipi kullanıyorsan yine ona göre kasnağın olması gerekiyor. Motor kasnağının bir tam dönüşünde kaç mm ilerlediği bizim için önemli olan değer. Diğer yorumları oku.
3. Aklının karıştığı yeri söylemen gerekiyor ki açıklayabileyim 🙂
Arduino Kütüphanesine Dediğin Şekilde Oluşturdum.Arduino Ya “polargraph_server_a1.ino” dosyasını atmaya çalışıyorum “polargraph_server_a1.ino:104:26: fatal error: AccelStepper.h: No such file or directory
compilation terminated.
Derleme sırasında hata oluştu.”
diye yazı çıkıyor Arduino Programında
Kütüphaneleri kurmamışsın, zip dosyasıyla beraber gelen kütüphaneleri kur. Ve de accelstepper kütüphanesini de kopyala Arduino->libraries içerisine.
merhaba murat abi. processinde load vektör diyorum ınkscapede “ınkscape SVG(*.svg) olarak kaydettiğim dosyayı açıyorum ama processing ekranında görünmüyor yadım edersen çok sevinirim. 🙂
Diğer yorumları oku, benzer sorulara cevap vermiştim. Bendeki Inkscape versiyonunu ve eklentiyi kullanırsan çalışacaktır. Linkleri vermiştim.
murat abi eklentinin 3156. satırınnın neresine yazıcaz “self.unittouu”
Eklenti içeriğini değiştirmek yerine birbiri ile uyumlu versiyonları kullanmanı tavsiye ederim. Uyumlu eklenti ve Inkscape versiyonunu önceki yorumlarda verdim.
Yine de değişiklik yaparak düzeltmek isteyenler için:
Laserengraver.py dosyasının içinde, 3080. satırdaki şu kodu bul:
doc_height = inkex.unittouu(self.document.getroot().get(‘height’))
Bu kodun yerine şunu yaz:
doc_height = self.unittouu(self.document.getroot().xpath(‘@height’, namespaces=inkex.NSS)[0])
Kendim çizim yapsamda yiye ayni hatalri veriyor bide illede bu programi kullanarakmi yuklemek gerekiyor processin e yoksa internette indirilen düz .svg dosyasini processin e yüklenirmi ?
şimdi murat abi problemler bunlar 🙂
1. processingde load vektör diyorum svg uzantılı resimi seçiyorum fakat gözükmüyor 😛
2. select frame butonuna basılmıyor kapalı. 😛
1. Load vektör dedikten sonra bir önceki yorumda verdiğim komutları uygula, set frame, resize, move gibi. Hala göremiyorsan başka dosya dene, basit bir şey olsun emin olalım. Şu dosyayı deneyebilirsin.
2. Programı aşağı at, sonra tekrar aç. Sonra bir daha dene. Programda bir bug var bazen yapıyor. Select Area -> Set frame to area de.
ilgin için saol murat abi 🙂
sadece select frame olmadı okadar diğerlerinin hepsi oldu
Vektörü yükleyebildin mi 🙂
evt ama svg uzantıya çevirdiğim dosyaları açmıyor
Bir hata yapıyorsun büyük ihtimalle. Farklı dosyalarla farklı yöntemlerle deneyerek bulabilirsin nerede hata yaptığını.
bide murat abi
beni .svg uzantıya çevirdiğim resmi açmıyor ama senin verdiğin çizim açtı neden benimkini açmıyor 🙂
ilgin için çok saol murat abi son bir sorum daha olucak
videoda bağlantıları kurarken en son bilgisayara taktığın kablo ne kablosu 🙂 kullanmaya gerek varmı:) (20:20 – 20:25 dk arasında)
Pc adaptör kablosu 🙂 Kullanmaya gerek var yani!
Murat abi aklıma bir şey taķıldı biz motorlara elektriği shield üzerindeki extermal motor power kısmından vereceğiz değilmi ??
Evet, oraya motorunun ihtiyacı kadar verebilirsin, aynı zamanda fan vs. takmak için de kullanabilirsin, sürücüleri soğutmak için.
Processing’de açtığın programda yukarıda anlattığım şekilde ayarları girip, UPLOAD MACHINE SPEC diyebilirsin. Arduino koduna dokunmana gerek yok, olduğu gibi bırak.
currentAcceleration, motorun ivmesini gösterir. Yani Bir noktadan diğer noktaya giderken (hızlanırken ve yavaşlarken) olmasını istediğin ivme. Ne kadar yüksek olursa o kadar çabuk hızlanır veya yavaşlar. Çizimlerde titremeler görüyorsan azaltabilirsin.
stepMultiplier değeri de mikrostep değerini ifade eder, yani 1 standart adımı kaça böleceğini.
defaultMachineWidth Motorların kasnak orta noktaları arasındaki mesafe (motor millerinin merkezlerinin birbirine olan mesafesi).
step motorları ve servo motoru adafruit motor shield e nasıl bağlıycaz gösterebilirmisniz
Erdinç merhaba. Yukarıda verdiğim fotoğraf ve şemalarda her şeyi belli. Motorların 4 kabloluysa, motor shield’in iki tarafında bulunan yuvalara her bir motorunun bağlantılarını yapacaksın. Yani M1 ve M2 yazana 1 motorun 4 kablosu, M3 ve M4 yazana da diğeri. Servonun 3lü kablosunu direkt takacağın yer de yazıyor zaten shield üzerinde, verdiğim resimlerden de görebilirsin.
Selam Murat bey yukarı da verdiğiniz adımları bire bir yaptım fakat processingde
controlP5.BitFontRenderer getWidth
WARNING: You are using a character that is not supported by controlP5’s BitFont-Renderer, you could use ControlFont instead (see the ControlP5controlFont example).
hatasını alıyorum. Ama programım çalışıyor. Polargraphcontroller kısmını açabiliyorum bu sefer de serial port seçeneğinden portu seçtiğim zaman “polargraph is not connected” hatası alıyorum. Bu hata bazende erişim engellendi hatası ile birlikte geliyor ama erişim engellendi hatası sürekli gelmiyor. Yardımcı olabilirseniz sevinirim
O uyarı çok önemli değil, bazı karakterleri gösteremez sadece. Yeni versiyon controllerda ControlP5 yok zaten. Eğer port kullanılmıyorsa (örneğin Arduino IDE serial monitor açıksa bu hatayı alırsın, çünkü o program bu esnada o port üzerinden haberleşiyor oluyor) o zaman sorun yaşamaman gerekir. Arduino üzerine yazılımı attığına emin ol.
Her şey düzgünse, polargraphcontroller’da port seçim ekranında başka porta tıkla, sonra tekrar doğru porta tıkla.
Hala sorun yaşıyorsan, aygıt yöneticisini aç, Arduino portlara gel, Arduino portuna çift tıkla ve başka numara ver. O numarayı controllerda seç.
Öncelikle çok teşekkür ederim murat bey şuanda daha önceki hatamı sizin sayenizde çözebildim. Ama bu sefer de motorlarım düzgün çalışmıyorlar kabloları değiştirin demişsiniz motorun kablolarını kendi yerlerini değiştirdim 2 şerli grup olanları içlerinde değiştirdim. Hatta motor kablolarının yerlerini değiştirdim hiç bir şey değişmedi sonuç gene aynı neyden kaynaklı olabileceğini biliyormusunuz
Step motorlarının bobin çiftlerini bulman gerekli öncelikle. Onu da 3 şekilde bulabilirsin:
1. Multimetre ile ölçüm yaparak bulabilirsin, multimetre diyot modundayken birbirine kısa devre olan uçlardır.
2. Bir led alarak ayaklarını uçlara değdirip, motorun kasnağını çevir, led hangi 2 uçta yanıp sönüyorsa o uçlardır.
3. Uçları birbirine değdirerek kasnağı çevir. Hangi iki uçta motor daha zor dönüyorsa, o uçlardır.
Sonra motor sürücünün datasheetine bakarak, bu uçları doğru yerlere bağladığına ve sürücüye de dışarıdan yeterli enerji verdiğine emin ol. Standart kodla motorlardan hareket alabilmen gerekir.
Muray bey dediniz gibi yaptım datasheetine baktım bağlantıları yapıyorum ama bir türlü düzgün çalışmıyor 1 kez yönlendirdiğim nokta ya gitti sonrasında makinenin kurulumunu yaptım programın ayarlarını verdim ama bu sefer yönlendirdiğim yere gitmedi. Başka bir öneriniz var mı
Sistemin davranışını daha detaylı açıklaman gerekiyor. Yani sen ne komut verdin ve sistem nasıl davrandı?
BAĞLANTI ŞEKLİNİ BÖYLE YAPTIM MURAT ABİ

Diğer yorumları bir oku, verdiğim standart kodlar var, onlarla motorlara hareket verebiliyor olman lazım. Bağlantılar doğru gözüküyor, fakat motor çıkışlarını datasheet ile kontrol et, yeşil-siyah ve kırmızı-mavi bobinlere ait olmalı. Ölçerek de anlayabilirsin.
Murat Abi Svg Formatındaki çizimi yükledim 1. sıkıntısız çalıştı 2. de çalışıyo kodu üretiyo fakat kod satırındaki kodlar çok hızlı akıyor ondan dolayı çizim yapmadı bunun ayarı varmı acaba onuda halledersen sıkıntı kalmaz herhalde.
Eğer motorlardan tepki alamazsa hızlıca akar kodlar. Bağlantılarını kontrol ederek farklı bir çizimle dene.
arduino kodu derlerken multiplier was not declared in the scrope hatası veriyor.
Arduino IDE v1.6.5 ve öncesini kullan, yeni versiyonlarda sorun olabiliyor.
anladım teşekkürler.
MURAT BEY ARDUİNO NUN ÇALIŞAN KÜTÜPHANELERİNİ PAYLAŞABİLİRMİSİNİZ PROGRAMI DERLERKEN HATA VERİYOR DEDİGİNİZİN AYNISINI YAPMAMA RAGMEN 1.0.5 VERSİYONUNUDA DENEDİM YİNE DERLEYİP ARDUİNO UNO YA YÜKLEYEMİYORUM
Diğer yorumlarda kütüphaneleri de belirtmiştim, basit bir aramayla internetten indirip ekleyebilirsin.
TAMAMDIR ONLARDA YAPTIM AMA EN BAŞTAN YENİDEN YAPACAGIM İLGNİZ İÇİN TEŞEKKÜRLER
ŞÖYLE Bİ HATA ALIYORUM ŞİMDİ ARDUİNOYA YÜKLEYECEGİM PROGRAMI DERLERKEN
polargraph_server_a1:157: error: ‘multiplier’ was not declared in this scope
polargraph_server_a1:158: error: ‘multiplier’ was not declared in this scope
exit status 1
‘multiplier’ was not declared in this scope
Verdiğim versiyonları kullan. Buna Arduino IDE de dahil. 1.0.5 kullan, yeni versiyonlarla uyumsuzluk olabilir. Kütüphanelerin tamamını doğru şekilde yüklemeyi unutma.
ALLAH RAZI OLSUN MURAT ABİ ÇALIŞTI ARDUİDO 1.5.7 SÜRÜMÜ SORUNSUZ ÇALIŞIYOR SADECE SANIRIM MOTORLARA TAKTIGIM DANDİK 2 TANE 9 VOLTLUK PİLLERİN AKIMI YETMİYOR 😀 BAŞLIYOR BİRAZ GİDİYOR ARDUİNO DURUYOR SAGOLASIN
Murat bey başta belirmek isterim butün ekip supersiniz; ufacık bi sorum olucak… bir cnc kol düşünelim Önunde değişik şekillerde şekerler ama şekerlerin konumunu kamerasıyla bulun duzenlesin ve ve ona uygun olan kutuya koysun…ve bunları yaparken kamerasıyla konum ve şekillerini ayıra bilsin MÜMKÜN MÜ? int. arştırdım ama cok bi kaynak bulamadım… şimdiden teşekkürler…..
Merhaba, elbette mümkün. Biz kendi atölyemizde vida somun vs ayırmak için bir sistem geliştiriyoruz. Yeni sezonda işleyeceğiz.
Merhababa programınızı çok seviyorum tüm malzemelerim var fakat arduinoya kodları bir türlü atamadım hata veriyor 4 gündür uğraşıyorumj yardımcı olur musunuz lütfen
Hatayı ve geçtiğin aşamaları yazarsan yardımcı olabilirim. Diğer yorumlara verdiğim cevapları oku bir de, yardımcı olacaktır.
Bu hatalar doğru yükleme yapılmaması kaynaklı olur. Arduino IDE 1.05 versiyonunu portable olarak kullanıp bir denemeni tavsiye ederim.
Yükledim fakat olmuyor yapmayı çok istiyorum ama birtürlü yapamadım acaba yazılım kısmını pc üzerinden video ile anlatırmısınız gerçkten yapmayı çok istiyorum ltfen yardım edin
Ziya merhaba. Bu sorun senin pc ile alakalı demek ki. Başka bir pc ile dene. Verdiğim yazılımları kurduysan ve yönergeleri takip ettiysen çalışacaktır. Bu şekilde yapıp bana videolar gönderen sayısız arkadaşlar var.